dsp.FastTransversalFilter
Fast transversal least-squares FIR adaptive filter
Description
The dsp.FastTransversalFilter computes output, error and
coefficients using a fast transversal least-squares FIR adaptive filter.
To implement the adaptive FIR filter object:
Create the
dsp.FastTransversalFilterobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
ftf = dsp.FastTransversalFilterftf, which is a fast transversal,
least-squares FIR adaptive filter. This System object computes the filtered output and the filter error for a given input and
desired signal.
ftf = dsp.FastTransversalFilter(len)dsp.FastTrasversalFilter
System object with the Length property set to
len.
ftf = dsp.FastTransversalFilter(PropertyName=Value)length to 64.
Properties
Usage
Syntax
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
System identification is the process of identifying the coefficients of an unknown system using an adaptive filter. The general overview of the process is shown in System Identification –– Using an Adaptive Filter to Identify an Unknown System. The main components involved are:
The adaptive filter algorithm.
An unknown system or process to adapt to. In this example, the filter designed by
designLowpassFIRis the unknown system.Appropriate input data to exercise the adaptation process. In a generic system identification model, the desired signal d(k) and the input signal x(k) are used to exercise the adaptation process.
The objective of the adaptive filter is to minimize the error signal between the output of the adaptive filter y(k) and the output of the unknown system (or the system to be identified) d(k). Once the error signal is minimized, the adapted filter resembles the unknown system. The coefficients of both the filters match closely.
Unknown System
Create a dsp.FIRFilter object that represents the system to be identified. Use the designLowpassFIR function to design the filter coefficients. The designed filter is a 10th order lowpass digital filter with a cutoff frequency of 0.25.
filt = dsp.FIRFilter; filt.Numerator = designLowpassFIR(FilterOrder=10,CutoffFrequency=.25)
filt =
dsp.FIRFilter with properties:
Structure: 'Direct form'
NumeratorSource: 'Property'
Numerator: [-0.0039 1.7585e-18 0.0321 0.1167 0.2207 0.2687 0.2207 0.1167 0.0321 1.7585e-18 -0.0039]
InitialConditions: 0
Show all properties
Pass the signal x to the FIR filter. The desired signal d is the sum of the output of the unknown system (FIR filter) and an additive noise signal n.
x = randn(1000,1); d = filt(x) + 0.01*randn(1000,1);
Adaptive Filter
With the unknown filter designed and the desired signal in place, create and apply the fast transversal filter object to identify the unknown filter.
Create a dsp.FastTransversalFilter object to represent an adaptive filter. Set the length of the adaptive filter to 11 taps and a forgetting factor of 0.99.
ftf1 = dsp.FastTransversalFilter(11,...
ForgettingFactor=0.99)ftf1 =
dsp.FastTransversalFilter with properties:
Method: 'Fast transversal least-squares'
Length: 11
ForgettingFactor: 0.9900
InitialPredictionErrorPower: 10
InitialCoefficients: 0
InitialConversionFactor: 1
LockCoefficients: false
Pass the primary input signal x and the desired signal d to the fast transversal filter. Run the adaptive filter to determine the unknown system. The output y of the adaptive filter is the signal converged to the desired signal d, thereby minimizing the error e between the two signals.
[y,e] = ftf1(x,d); w = ftf1.Coefficients
w = 1×11
-0.0043 0.0016 0.0308 0.1171 0.2204 0.2677 0.2210 0.1181 0.0323 0.0013 -0.0037
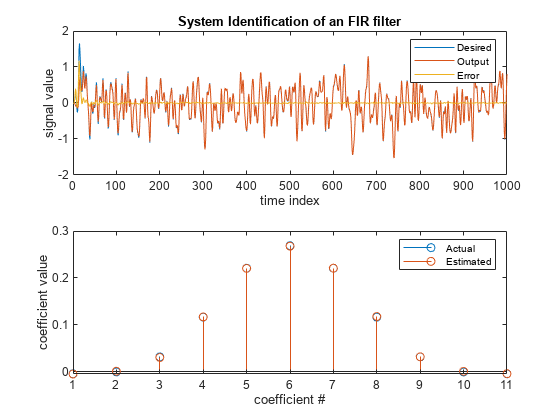
Plot the results. The output signal matches the desired signal very closely making the error between the two close to zero.
subplot(2,1,1); plot(1:1000,[d,y,e]) title("System Identification of an FIR filter"); legend("Desired","Output","Error"); xlabel("time index"); ylabel("signal value");
The coefficients of the FIR filter match very closely with the coefficients of the adapted filter, thereby confirming the convergence.
subplot(2,1,2); stem([filt.Numerator; w].'); legend("Actual","Estimated"); xlabel("coefficient #"); ylabel("coefficient value");
References
[1] Haykin, Simon. Adaptive Filter Theory, 4th Ed. Upper Saddle River, NJ: Prentice Hall, 2002.
Extended Capabilities
Version History
Introduced in R2013b