feedback
Feedback connection of multiple models
Syntax
Description
sys = feedback(sys1,sys2)sys for the negative feedback interconnection of
model objects sys1,sys2.
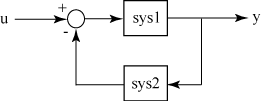
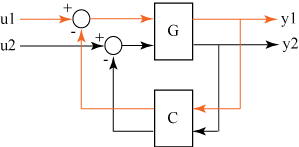
From the figure, the closed-loop model sys has
u as input vector and y as output vector. Both
models, sys1 and sys2, must either be continuous or
discrete with identical sample times.
Examples
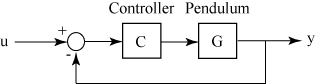
pendulumModelAndController.mat contains a SISO inverted pendulum transfer function model G and its associated PID controller C.
Load the inverted pendulum and controller model to the workspace.
load('pendulumModelAndController','G','C'); size(G)
Transfer function with 1 outputs and 1 inputs.
size(C)
PID controller with 1 output and 1 input.
To create this loop structure, connect the controller and plant models in series to create sys1, and set sys2 to 1 to represent unit feedback. By default, the function applies negative feedback, but you can use the optional sign argument to specify the type of feedback. For this example, you can either omit the sign argument or set it to -1 for negative feedback.
sys1 = G*C; sys2 = 1; sign = -1;
Use feedback to create the negative feedback loop with G and C.
sys = feedback(sys1,sys2,sign)
sys =
1.307e-06 s^3 + 3.136e-05 s^2 + 5.227e-06 s
---------------------------------------------------------
2.3e-06 s^4 + 1.725e-06 s^3 - 4.035e-05 s^2 - 5.018e-06 s
Continuous-time transfer function.
Model Properties
sys is the resultant closed loop continuous-time transfer function obtained using negative feedback.
For this example, consider two transfer functions that describe a plant G and controller C respectively.
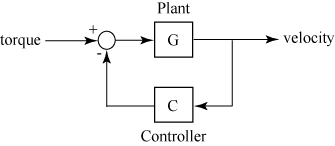
Create the plant and controller transfer functions.
G = tf([2 5 1],[1 2 3],'inputname',"torque",'outputname',"velocity"); C = tf([5,10],[1,10]);
Use feedback to create the negative feedback loop using G and C.
sys = feedback(G,C,-1)
sys = From input "torque" to output "velocity": 2 s^3 + 25 s^2 + 51 s + 10 --------------------------- 11 s^3 + 57 s^2 + 78 s + 40 Continuous-time transfer function. Model Properties
sys is the resultant closed loop transfer function obtained using negative feedback with torque as the input and velocity as the output.
For this example, consider two transfer functions that describe a plant G and controller C respectively.
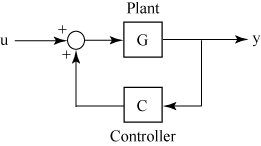
Create the plant and controller transfer functions.
G = tf([2 5 1],[1 2 3],'inputname',"torque",'outputname',"velocity"); C = tf([5,10],[1,10]);
Use feedback to create the positive feedback loop using G and C.
sys = feedback(G,C,+1)
sys = From input "torque" to output "velocity": -2 s^3 - 25 s^2 - 51 s - 10 --------------------------- 9 s^3 + 33 s^2 + 32 s - 20 Continuous-time transfer function. Model Properties
sys is the resultant closed loop transfer function obtained using positive feedback with torque as the input and velocity as the output.
Based on the figure below, consider connecting two MIMO transfer functions with two inputs and two outputs in a negative feedback loop.
For this example, create two random continuous state-space models using rss.
G = rss(4,2,2); C = rss(2,2,2); size(G)
State-space model with 2 outputs, 2 inputs, and 4 states.
size(C)
State-space model with 2 outputs, 2 inputs, and 2 states.
Use feedback to connect the two state-space models in a negative feedback loop according to the above figure.
sys = feedback(G,C,-1); size(sys)
State-space model with 2 outputs, 2 inputs, and 6 states.
The resulting state-space model sys is a 2 input, 2 output model with 6 states. The negative feedback loop is completed such that,
The first output of
Gis connected to the first input ofCThe second output of
Gis connected to the second input ofC
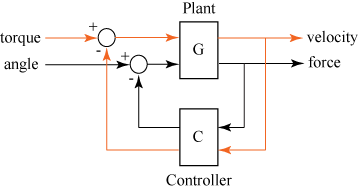
mimoPlantAndController.mat contains a 2 input, 2 output transfer function plant model G and a 2 input, 2 output transfer function controller model C to be connected as follows:
First, load the plant and controller models to the workspace.
load('mimoPlantAndController.mat','G','C'); size(G)
Transfer function with 2 outputs and 2 inputs.
size(C)
Transfer function with 2 outputs and 2 inputs.
By default, feedback would connect the first output of G to the first input of C and the second output of G to the second input of C. In order to connect the plant and controller according to the figure, name the respective I/Os of the two systems to ensure the correct connections.
G.InputName
ans = 2×1 cell
{'torque'}
{'angle' }
G.OutputName
ans = 2×1 cell
{'velocity'}
{'force' }
C.InputName
ans = 2×1 cell
{'force' }
{'velocity'}
C.OutputName
ans = 2×1 cell
{'angle' }
{'torque'}
Then use the 'name' flag with the feedback command to make the connections according to the I/O names.
sys = feedback(G,C,'name');The resulting closed loop negative feedback transfer function sys has the feedback connections in the required order.
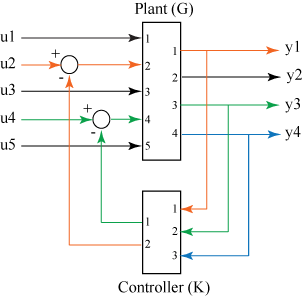
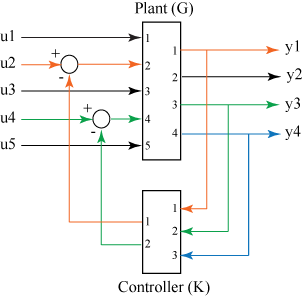
Consider a state-space plant G with five inputs and four outputs and a state-space feedback controller K with three inputs and two outputs. The outputs 1, 3, and 4 of the plant G must be connected to the controller K inputs, and the controller outputs to inputs 2 and 4 of the plant.
For this example, generate randomized continuous-time state-space models using rss for both G and K.
G = rss(3,4,5); K = rss(3,2,3);
Define the feedout and feedin vectors based on the inputs and outputs to be connected in a feedback loop.
feedin = [2 4]; feedout = [1 3 4]; sys = feedback(G,K,feedin,feedout,-1); size(sys)
State-space model with 4 outputs, 5 inputs, and 6 states.
sys is the resultant closed loop state-space model obtained by connecting the specified inputs and outputs of G and K.
Input Arguments
Systems to connect in a feedback loop, specified as dynamic system models. Dynamic systems that you can use include:
Continuous-time or discrete-time numeric LTI models such as
tf,zpk,pid,pidstd, orssmodels.Generalized or uncertain LTI models such as
genssoruss(Robust Control Toolbox) models. (Using uncertain models requires Robust Control Toolbox™ software.)The resulting feedback loop assumes
current values of the tunable components for tunable control design blocks.
nominal model values for uncertain control design blocks.
For more information, see dynamic system models.
When sys1 and sys2 are two different model
types, feedback uses precedence rules to determine the resulting
model sys. For example, when a state-space model and a transfer
function is connected in a feedback loop, the resulting system is a state-space model
based on the precedence rules. For more information, see Rules That Determine Model Type.
Subset of inputs to be used, specified as a vector.
From the figure, feedin contains indices of the
input vector of MIMO plant P and specifies which subset of inputs
u are involved in the feedback loop. The resulting model
sys has the same inputs as G, with their
orders preserved.
For an example, see Specify Input and Output Connections in a Feedback Loop.
Subset of outputs to be used, specified as a vector.
feedout specifies which outputs of MIMO plant
G are used for feedback. The resulting model
sys has the same outputs as G, with their
orders preserved.
For an example, see Specify Input and Output Connections in a Feedback Loop.
Type of feedback, specified as -1 for negative feedback or
+1 for positive feedback. feedback assumes
negative feedback by default.
Output Arguments
Limitations
The feedback connection must be free of algebraic loops. For instance, if D1 and D2 are the feedthrough matrices of
sys1andsys2, this condition is equivalent to:I + D1D2 nonsingular when using negative feedback
I − D1D2 nonsingular when using positive feedback
Version History
Introduced before R2006a