hinfstruct
H∞ tuning of fixed-structure controllers
Syntax
Description
CL = hinfstruct(CL0)genss model CL0. This tuning minimizes the
H∞ norm of the closed-loop transfer
function modeled by CL0. The model CL0 represents
a closed-loop control system that includes tunable components such as controllers or
filters. CL0 can also include weighting functions that capture design
requirements.
[
tunes the parametric controller blocks C,gamma,info]
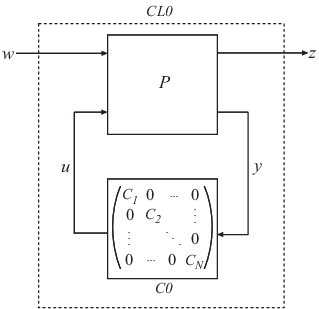
= hinfstruct(P,C0,options)C0. This tuning minimizes the
H∞ norm of the closed-loop system
CL0 = lft(P,C0). To use this syntax, express your control
system and design requirements as a Standard Form model, as in the following
illustration.
P is a numeric LTI model that includes the fixed elements of the
control architecture. P can also include weighting functions that
capture design requirements. C0 can be a single tunable component (for
example, a Control Design Block
or a genss model) or a cell array of multiple
tunable components. C is a parametric model or cell array of parametric
models of the same type or types as C0.
Examples
Tune the controller elements of the following control system.
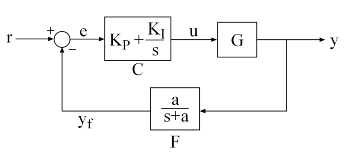
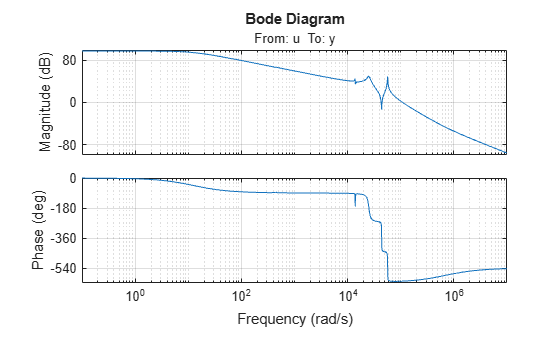
The control elements are C, which is a PI controller with two free parameters, and F, which is a low-pass filter in the feedback path with one free parameter. For this example, load the plant G, a ninth-order model of the head disk assembly (HDA) in a hard disk drive.
load hinfstruct_demo G bode(G), grid
Tune the free parameters of this control system so that the head position y tracks a step change r with a response time of about 1 ms, little or no overshoot, and no steady-state error.
First, create the tunable elements. Use a tunablePID object to parameterize the PI block, and specify the filter F0 as a transfer function depending on a tunable real parameter a.
C0 = tunablePID('C','pi'); a = realp('a',1); F0 = tf(a,[1 a]);
F0 is a genss model.
Next, express the design goals as weights on the plant model, and append them to the closed-loop system. For reasons described in detail in Fixed-Structure H-infinity Synthesis with hinfstruct, the following configuration of weighting functions achieves the design requirements for this problem.
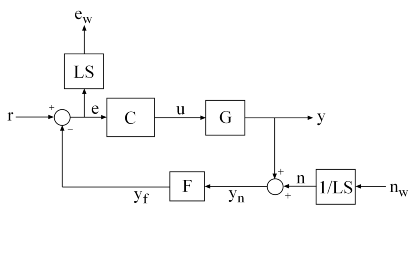
Here, LS is the desired shape of the open-loop response .
wc = 1000; % target crossover s = tf('s'); LS = (1+0.001*s/wc)/(0.001+s/wc);
As discussed in Fixed-Structure H-infinity Synthesis with hinfstruct, the design requirements are satisfied if the norm of this control structure is less than 1.
Use connect to construct a genss model representing this control structure.
% Label the block I/Os Wn = 1/LS; Wn.u = 'nw'; Wn.y = 'n'; We = LS; We.u = 'e'; We.y = 'ew'; C0.u = 'e'; C0.y = 'u'; F0.u = 'yn'; F0.y = 'yf'; % Specify summing junctions Sum1 = sumblk('e = r - yf'); Sum2 = sumblk('yn = y + n'); % Connect the blocks together T0 = connect(G,Wn,We,C0,F0,Sum1,Sum2,{'r','nw'},{'y','ew'});
You can now use hinfstruct to find tuned values of the tunable parameters in C0 and F0 that minimize the norm of T0. To reduce the risk of finding local minima, run six optimizations, started from randomized initial values for C0 and F0. The RandomStart option of hinfstructOptions specifies how many additional optimizations to run beyond the default one.
rng('default') opt = hinfstructOptions('Display','final','RandomStart',5); T = hinfstruct(T0,opt);
Final: Peak gain = 3.88, Iterations = 67
Final: Peak gain = 597, Iterations = 175
Some closed-loop poles are marginally stable (decay rate near 1e-07)
Final: Peak gain = 597, Iterations = 183
Some closed-loop poles are marginally stable (decay rate near 1e-07)
Final: Peak gain = 1.56, Iterations = 101
Final: Peak gain = 1.56, Iterations = 98
Final: Peak gain = 1.56, Iterations = 96
The best closed-loop gain is about 1.56, so the constraint is nearly satisfied. The hinfstruct command returns the tuned closed-loop transfer . To validate the design, plot the tuned open-loop response L = F*G*C and compare it with the target loop shape LS. To compute L, use getBlockValue to get the tuned value of and use getValue to evaluate the filter for the tuned value of .
C = getBlockValue(T,'C'); F = getValue(F0,T.Blocks); % Propagate tuned parameters from T to F L = G*C*F; bode(LS,'r--',G*C*F,'b',{1e1,1e6}), grid, title('Open-Loop Response'), legend('Target','Actual')
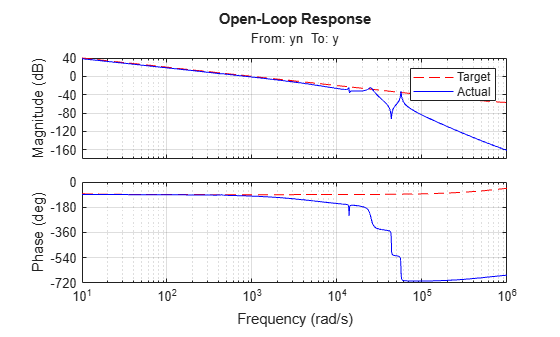
The 0 dB crossover frequency and overall loop shape are as expected. For further analysis of the result, see Fixed-Structure H-infinity Synthesis with hinfstruct.
Input Arguments
Closed-loop system with tunable elements, specified as a genss
model. This model describes the closed-loop transfer function of a control system,
incorporating appropriate weighting functions on the plant inputs and outputs to capture
your design requirements. For more information about selecting weights for
H∞ tuning, see Formulating Design Requirements as H-Infinity Constraints.
CL0 includes both the fixed and tunable components of the
control system. You represent the tunable components of the control system using tunable
control design blocks, which are stored in the
CL0.Blocks property of the genss model. For
more information about constructing this generalized model, see Extract Tunable Control System from Simulink Model.
hinfstruct tunes the tunable elements of CL0
to minimize the H∞ norm.
Fixed elements of the control architecture, specified as a numeric LTI model such as
a state-space (ss) model. P is the plant (along
with any weighting functions to capture design requirements) that results from
expressing your system in standard form, pulling any tunable elements into the
block-diagonal controller as shown in the following diagram.
You can obtain P in two ways:
In MATLAB®, model the fixed elements of your control system as numeric LTI models. Then, use block-diagram building functions (such as
connectandfeedback) to buildPfrom the modeled components. Also, include any weighting functions that represent your design requirements.If you have a Simulink® model of your control system and have Simulink Control Design™, use
linlft(Simulink Control Design) to obtain a linear model of the fixed elements of your control system. Thelinlftcommand linearizes your Simulink model, excluding specified Simulink blocks (the blocks that represent the controller elements you want to tune). If you use weighting functions to represent your design requirements, connect them in series with the linear model of your plant to obtainP.
P can be a continuous-time or discrete-time model. In discrete
time, the sample time must be specified (Ts ≠ –1), and must match the
sample time of C0.
Tunable elements of the control architecture in standard form, specified as one of the following:
A tunable control design block such as
tunableSS,tunableGain, ortunablePIDA generalized state-space (
genss)A cell array in which each entry is a tunable block or
genssmodel
For more information and examples of creating tunable models, see Models with Tunable Coefficients.
C0 can be a continuous-time or discrete-time model, as long as
the sample time matches that of P.
Algorithm options, specified as an hinfstructOptions options set. For information about available options,
see hinfstructOptions.
Output Arguments
Tips
hinfstructis related tohinfsyn, which also uses H∞ techniques to design a controller for a MIMO plant. However, unlikehinfstruct,hinfsynimposes no restriction on the structure and order of the controller. For that reason,hinfsynalways returns a smallergammathanhinfstruct. You can therefore usehinfsynto obtain a lower bound on the best achievable performance.Using
hinfstructrequires some familiarity with H∞ techniques. You must express your design requirements as frequency-weighting functions on plant inputs and outputs, as described in Formulating Design Requirements as H-Infinity Constraints. For a simpler approach to fixed-structure tuning, usesystuneorlooptune.
Algorithms
hinfstruct uses specialized nonsmooth optimization techniques to
enforce closed-loop stability and minimize the
H∞ norm as a function of the tunable
parameters. These techniques are based on the work in [1].
hinfstruct computes the
H∞ norm using the algorithm of [2] and structure-preserving eigensolvers from the SLICOT library. For more information about
the SLICOT library, see https://github.com/SLICOT.
References
[1] Apkarian, Pierre, and Dominikus Noll. "Nonsmooth H∞ Synthesis." IEEE Transactions on Automatic Control, 51, no. 1 (January 2006): 71–86. https://doi.org/10.1109/TAC.2005.860290.
[2] Bruinsma, N.A., and M. Steinbuch. "A Fast Algorithm to Compute the H∞ Norm of a Transfer Function Matrix." Systems & Control Letters, 14, no.4 (April 1990): 287–93. https://doi.org/10.1016/0167-6911(90)90049-Z.
Extended Capabilities
Version History
Introduced in R2010b
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)