linlft
Linearize model while removing contribution of specified blocks
Syntax
lin_fixed = linlft(sys,io,blocks)
[lin_fixed,lin_blocks] = linlft(___)
[___] = linlft(___,opt)
Description
lin_fixed = linlft(sys,io,blocks) linearizes
the Simulink® model named sys while removing
the contribution of certain blocks. Specify sys as
a character vector or string. Specify the full block path of the blocks
to ignore in the cell array of character vectors or string array called blocks.
The linearization occurs at the operating point specified in the Simulink model,
which includes the ignored blocks. You can optionally specify linearization
points (linear analysis points) in the I/O object io.
The resulting linear model lin_fixed has this form:
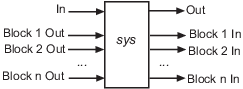
The top channels In and Out correspond to the linearization
points you specify in the I/O object io. The remaining
channels correspond to the connection to the ignored blocks.
When you use linlft and specify the 'block-by-block' linearization
algorithm in linearizeOptions, you can use all
the variations of the input arguments for linearize.
You can linearize the ignored blocks separately using linearize,
and then combine the linearization results using linlftfold.
[lin_fixed,lin_blocks] = linlft(___) returns
the linearizations for each of the blocks specified in blocks.
If blocks contains a single block path, lin_blocks is
a single state-space (ss)
model. If blocks is an array identifying multiple
blocks, lin_blocks is a cell array of state-space
models. The full block path for each block in lin_blocks is
stored in the Notes property of the state-space
model.
[___] = linlft(___,opt) uses
additional linearization options, specified as a linearizeOptions option
set.
Examples
In this example, the scdtopmdl model contains two subsystems in the feedforward path.
Fixed portion, which contains everything except the Parameter Varying Controller model reference
Parameter Varying Controller model, which references the
scdrefmdlmodel
Open the top-level model.
topmdl = 'scdtopmdl';
open_system(topmdl)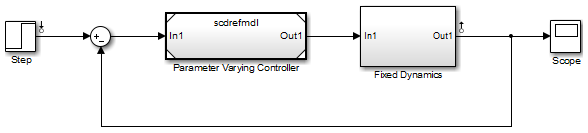
Linearize this model without the Parameter Varying Controller block.
io = getlinio(topmdl);
blocks = {'scdtopmdl/Parameter Varying Controller'};
sys_fixed = linlft(topmdl,io,blocks);Linearize the controller model.
refmdl = 'scdrefmdl';
load_system(refmdl);
sys_pv = linearize(refmdl);Combine the linearization results.
sys_closed = lft(sys_fixed,sys_pv);
Version History
Introduced in R2009b
See Also
linlftfold | linearize | linio | getlinio | operpoint | linearizeOptions