transmit
Description
Examples
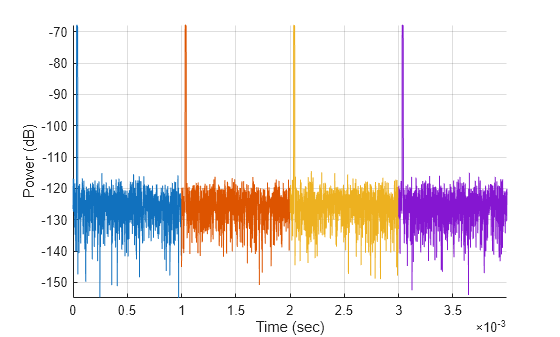
This example shows how to create a simple bistatic scenario with a moving target. Transmit and collect pulses until the completion of 1 receive window and plot the results.
Configure the bistatic transmitter and receiver. Use a pulse repetition frequency of 1000 Hz.
prf = 1e3; wav = phased.LinearFMWaveform(PRF=prf,PulseWidth=1e-5); ant = phased.SincAntennaElement(Beamwidth=10); tx = bistaticTransmitter(Waveform=wav, ... Transmitter=phased.Transmitter(Gain=20), ... TransmitAntenna=phased.Radiator(Sensor=ant)); rx = bistaticReceiver( ... ReceiveAntenna=phased.Collector(Sensor=ant), ... WindowDuration=0.005); freq = tx.TransmitAntenna.OperatingFrequency;
Create bistatic transmitter and bistatic receiver platforms spaced 10 km apart and add a target platform. Use radarScenario to create the platforms for this example. Define the transmitter platform, receiver platform, and target platform using platform and give the target a trajectory.
scene = radarScenario(UpdateRate=prf); platform(scene,Position=[-5e3 0 0], ... Orientation=rotz(45).'); platform(scene,Position=[5e3 0 0], ... Orientation=rotz(135).'); traj = kinematicTrajectory( ... Position=8e3*[cosd(60) sind(60) 0],Velocity=[0 150 0]); tgtPlat= platform(scene,Trajectory=traj);
Create an empty plot.
hFig = figure; hAxes = axes(hFig);
Transmit and collect pulses for one receive window. First, update platform positions by calling advance on the scene and then get the platform positions using platformPoses. Next, get the propagation paths using bistaticFeeSpacePath. Then, transmit the signal and receive pulses. Finally, plot the received signals.
t = nextTime(tx); tEnd = nextTime(rx); while t < tEnd advance(scene); % Get platform positions poses = platformPoses(scene); % Calculate paths proppaths = bistaticFreeSpacePath(freq, ... poses(1),poses(2),poses(3)); % Transmit [txSig,txInfo] = transmit(tx,proppaths,t); % Receive pulses [iq,rxInfo] = receive(rx,txSig,txInfo,proppaths); t = nextTime(tx); % Plot received signals rxTimes = (0:(size(iq,1) - 1))*1/rxInfo.SampleRate ... + rxInfo.StartTime; plot(hAxes,rxTimes,mag2db(abs(sum(iq,2)))) hold(hAxes,'on') end
Label the plot.
grid(hAxes,'on') xlabel(hAxes,'Time (sec)') ylabel(hAxes,'Power (dB)') axis(hAxes,'tight')
This example shows how to create a bistatic scenario with two bistatic transmitters. The receiver is located between the transmitters and there is a target with a custom radar cross section. Transmit and collect pulses for four receive windows and plot the results.
Configure the bistatic transmitters. Use a pulse repetition frequency of 1000 Hz.
prf = 1e3; wav = phased.LinearFMWaveform(PRF=prf,PulseWidth=0.2/prf); ant = phased.SincAntennaElement(Beamwidth=10); tx1 = bistaticTransmitter(Waveform=wav, ... Transmitter=phased.Transmitter(Gain=40), ... TransmitAntenna=phased.Radiator(Sensor=ant)); tx2 = clone(tx1); prf = 2e3; tx2.Waveform = phased.RectangularWaveform( ... PRF=prf,PulseWidth=0.2/prf); tx2.Transmitter.PeakPower = 2e3;
Configure the bistatic receiver.
rx = bistaticReceiver( ... ReceiveAntenna=phased.Collector(Sensor=ant), ... WindowDuration=0.0025); freq = tx1.TransmitAntenna.OperatingFrequency;
Create bistatic transmitter platforms spaced 10 km apart. Put the receiver platform between the two transmitters. For this example, create the platforms in radarScenario. Define the platforms using platform.
scene = radarScenario(UpdateRate=prf); tx1Plat = platform(scene,Position=[-5e3 0 0], ... Orientation=rotz(85).'); tx2Plat = platform(scene,Position=[5e3 0 0], ... Orientation=rotz(95).'); rxPlat = platform(scene,Position=[0 0 0], ... Orientation=rotz(90).');
Place a stationary target platform down range and assign the target a radar cross section.
rcsSig = rcsSignature(Pattern=20);
tgtPlat = platform(scene,Position=[0 50e3 0], ...
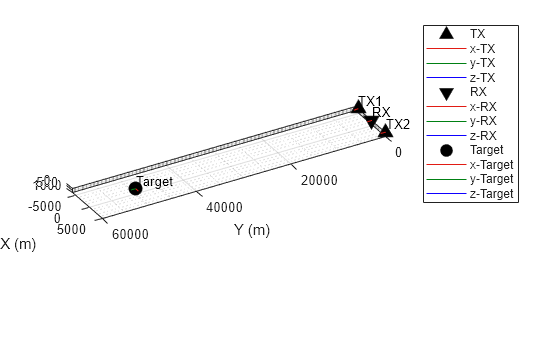
Signatures=rcsSig);Show platform locations and orientations.
tp = theaterPlot(Parent=axes(figure)); txPltr = orientationPlotter(tp,Marker="^", ... DisplayName="TX",LocalAxesLength=1e3); rxPltr = orientationPlotter(tp,Marker="v", ... DisplayName="RX",LocalAxesLength=1e3); tgtPltr = orientationPlotter(tp,Marker="o", ... DisplayName="Target",LocalAxesLength=1e3); poses = platformPoses(scene); plotOrientation(txPltr,[poses(1:2).Orientation], ... reshape([poses(1:2).Position],3,[]).',["TX1" "TX2"]); plotOrientation(rxPltr,poses(3).Orientation,poses(3).Position,"RX"); plotOrientation(tgtPltr,poses(4).Orientation,poses(4).Position,"Target");
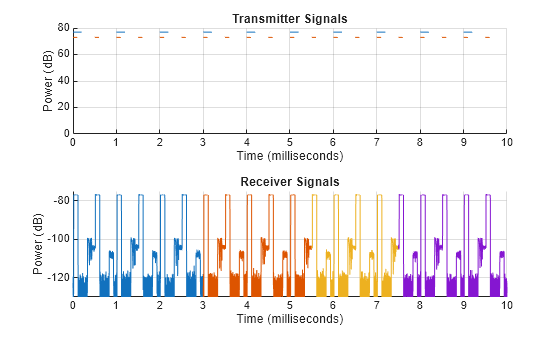
Transmit and collect pulses for four receive windows. First, update platform positions by calling advance on the scene. Then set up the for loop to iterate over the receive windows. Next, get platform positions using platformPoses. Get the propagation paths for both transmitters using bistaticFeeSpacePath. Then, transmit the signal and collect pulses. Finally, receive the transmissions and plot the received signals.
tl = tiledlayout(figure,2,1); hAxes = [nexttile(tl) nexttile(tl)]; hold(hAxes,"on"); tx = {tx1 tx2}; advance(scene); for iRxWin = 0:4 [propSigs,propInfo] = collect(rx,scene.SimulationTime); t = min([nextTime(tx{1}) nextTime(tx{2})]); tEnd = nextTime(rx); while t <= tEnd % Get platform positions poses = platformPoses(scene); % Include target RCS signature on the pose tgtPose = poses(4); tgtPose.Signatures = {rcsSig}; for iTx = 1:2 % Calculate propogation paths proppaths = bistaticFreeSpacePath(freq, ... poses(iTx),poses(3),tgtPose); % Transmit [txSig,txInfo] = transmit(tx{iTx},proppaths,scene.SimulationTime); % Plot transmitted signal txTimes = (0:(size(txSig,1) - 1))*1/txInfo.SampleRate ... + txInfo.StartTime; plot(hAxes(1),txTimes*1e3,mag2db(max(abs(txSig),[],2)),SeriesIndex=iTx); % Collect transmitted pulses collectSigs = collect(rx,txSig,txInfo,proppaths); % Accumulate collected transmissions sz = max([size(propSigs);size(collectSigs)],[],1); propSigs = paddata(propSigs,sz) + paddata(collectSigs,sz); end t = min([nextTime(tx{1}) nextTime(tx{2})]); advance(scene); end % Receive collected transmissions [iq,rxInfo] = receive(rx,propSigs,propInfo); % Plot received transmissions rxTimes = (0:(size(iq,1) - 1))*1/rxInfo.SampleRate ... + rxInfo.StartTime; plot(hAxes(2),rxTimes*1e3,mag2db(abs(iq))); end
Label plots.
grid(hAxes,"on") title(hAxes(1),"Transmitter Signals") title(hAxes(2),"Receiver Signals") xlabel(hAxes,"Time (milliseconds)") ylabel(hAxes,"Power (dB)") ylim(hAxes(1),[0 80]); ylim(hAxes(2),[-130 -75]) xlim(hAxes(1),xlim(hAxes(2)))
Input Arguments
Output Arguments
Version History
Introduced in R2025a