nlhw
Estimate Hammerstein-Wiener model
Syntax
Description
Estimate Hammerstein-Wiener Model
sys = nlhw(data,Orders)data can be in the form of
a timetable, a comma-separated pair
of numeric matrices, or a data object.
sys = nlhw(data,Orders,InputNonlinearity,OutputNonlinearity)InputNL and OutputNL as the
input and output nonlinearity estimators, respectively.
Specify Linear Model
sys = nlhw(data,LinModel,InputNonlinearity,OutputNonlinearity)InputNonlinearity and
OutputNonlinearity as the input and output nonlinearity
estimators, respectively.
Refine Existing Model
sys = nlhw(data,sys0)sys0, using the estimation data.
Use this syntax to:
Update the parameters of a previously estimated model to improve the fit to the estimation data. In this case, the estimation algorithm uses the parameters of
sys0as initial guesses.Estimate the parameters of a model previously created using the
idnlhwconstructor. Prior to estimation, you can configure the model properties using dot notation.
Specify Options
sys = nlhw(___,Options)Options that you create using nlhwOptions. Use
Options with any of the previous syntaxes.
Examples
load iddata3
m1 = nlhw(z3,[4 2 1]);Load data.
load twotankdata; z = iddata(y,u,0.2,'Name','Two tank system'); z1 = z(1:1000);
Create a saturation object with lower limit of 0 and upper limit of 5.
InputNL = idSaturation('LinearInterval',[0 5]);Estimate model with no output nonlinearity.
m = nlhw(z1,[2 3 0],InputNL,[]);
Generating a custom network nonlinearity requires the definition of a user-defined unit function.
Define the unit function and save it as gaussunit.m.
function [f,g,a] = gaussunit(x) % Custom unit function nonlinearity. % % Copyright 2015 The MathWorks, Inc. f = exp(-x.*x); if nargout>1 g = -2*x.*f; a = 0.2; end
Create a custom network nonlinearity using the gaussunit function.
H = @gaussunit; CNet = idCustomNetwork(H);
Load the estimation data.
load twotankdata; z = iddata(y,u,0.2,'Name','Two tank system'); z1 = z(1:1000);
Estimate a Hammerstein-Wiener model using the custom network.
m = nlhw(z1,[5 1 3],CNet,[]);
Estimate linear OE model.
load throttledata.mat Tr = getTrend(ThrottleData); Tr.OutputOffset = 15; DetrendedData = detrend(ThrottleData, Tr); opt = oeOptions('Focus','simulation'); LinearModel = oe(DetrendedData,[1 2 1],opt);
Estimate Hammerstein-Wiener model using OE model as its linear component and saturation as its output nonlinearity.
sys = nlhw(ThrottleData,LinearModel,[],idSaturation);
Load the estimation data.
load iddata1Construct a Hammerstein-Wiener model using idnlhw to define the model properties B and F.
sys0 = idnlhw([2,2,0],[],'idWaveletNetwork');
sys0.B{1} = [0.8,1];
sys0.F{1} = [1,-1.2,0.5];Estimate the model.
sys = nlhw(z1,sys0);
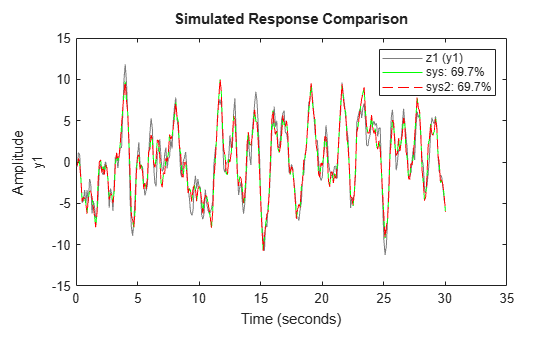
Estimate a Hammerstein-Wiener model using nlhw to define the model properties B and F.
sys2 = nlhw(z1,[2,2,0],[],'idWaveletNetwork','B',{[0.8,1]},'F',{[1,-1.2,0.5]});
Compare the two estimated models to see that they are equivalent.
compare(z1,sys,'g',sys2,'r--');
Estimate a Hammerstein-Wiener Model.
load iddata3 sys = nlhw(z3,[4 2 1],'idSigmoidNetwork','idWaveletNetwork');
Refine the model, sys.
sys = nlhw(z3,sys);
Create estimation option set for nlhw to view estimation progress, use the Levenberg-Marquardt search method, and set the maximum iteration steps to 50.
opt = nlhwOptions; opt.Display = 'on'; opt.SearchMethod = 'lm'; opt.SearchOptions.MaxIterations = 50;
Load data and estimate the model.
load iddata3
sys = nlhw(z3,[4 2 1],idSigmoidNetwork,idPiecewiseLinear,opt);Input Arguments
Output Arguments
Version History
Introduced in R2007aSee Also
idnlhw | nlhwOptions | idnlhw/findop | linapp | idnlhw/linearize | pem | init | oe | tfest | n4sid | goodnessOfFit | aic | fpe
Topics
- Estimate Multiple Hammerstein-Wiener Models
- Estimate Hammerstein-Wiener Models Initialized Using Linear OE Models
- Identifying Hammerstein-Wiener Models
- Available Nonlinearity Estimators for Hammerstein-Wiener Models
- Initialize Hammerstein-Wiener Estimation Using Linear Model
- Loss Function and Model Quality Metrics
- Regularized Estimates of Model Parameters
- Estimation Report