addBoundaries
Syntax
Description
Add-On Required: This feature requires the Scenario Builder for Automated Driving Toolbox add-on.
lbsegmentUpdated = addBoundaries(lbsegment,boundaryIDs,boundaryPoints)boundaryIDs, and
the boundary points relative to the specified boundary IDs
boundaryPoints, to the laneBoundarySegment object lbsegment, and returns an
updated laneBoundarySegment object, lbsegmentUpdated.
lbsegmentUpdated = addBoundaries(___,Name=Value)Index=1 adds a new lane boundary
as the left-most boundary.
Examples
Load lane boundary data into the workspace.
data = load("laneBoundarySegmentData.mat","lbsegment");
Display the loaded lane boundary segment object.
lbsegment = data.lbsegment
lbsegment =
laneBoundarySegment with properties:
BoundaryIDs: [4×1 string]
BoundaryPoints: {4×1 cell}
BoundaryInfo: []
NumBoundaries: 4
NumPoints: 128
GeoReference: []
Plot the lane boundary segment object.
plot(lbsegment)

Specify a boundary ID and boundary points for a new boundary.
boundaryID = "10";
boundaryPoints = {[-262 190 0; -140 120 0]};Add the specified boundary points to the lane boundary segment object.
lbsegmentUpdated = addBoundaries(lbsegment,boundaryID,boundaryPoints)
lbsegmentUpdated =
laneBoundarySegment with properties:
BoundaryIDs: [5×1 string]
BoundaryPoints: {5×1 cell}
BoundaryInfo: []
NumBoundaries: 5
NumPoints: 128
GeoReference: []
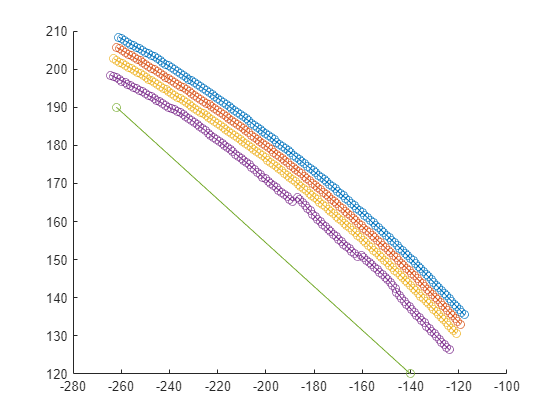
Plot the updated lane boundary segment object.
plot(lbsegmentUpdated)
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2024a