initial
System response to initial states of state-space model
Syntax
Description
For state-space and sparse state-space models, initial
computes the unforced system response y to initial states
xinit.
Continuous time:
Discrete time:
This is the system response when u(t) is maintained at the offset value u0.
For linear time-varying or linear parameter-varying state-space models,
initial computes the response with initial state
xinit, initial parameters
pinit (LPV models), and input held to the offset
value (u(t) =
u0(t) or u(t) =
u0(t,p), which corresponds to the initial condition response of the local linear
dynamics.
initial(___) plots the initial condition response of
sys with default plotting options for all of the previous input
argument combinations. For more plot customization options, use initialplot.
To plot responses for multiple dynamic systems on the same plot, you can specify
sysas a comma-separated list of models. For example,initial(sys1,sys2,sys3)plots the responses for three models on the same plot.To specify a color, line style, and marker for each system in the plot, specify a
LineSpecvalue for each system. For example,initial(sys1,LineSpec1,sys2,LineSpec2)plots two models and specifies their plot style. For more information on specifying aLineSpecvalue, seeinitialplot.
Examples
For this example, generate a random state-space model with 5 states and create the plot for the system response to the initial states.
rng("default")
sys = rss(5);
x0 = [1,2,3,4,5];
initial(sys,x0)
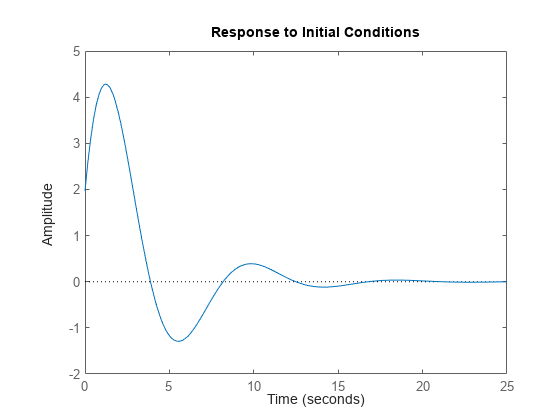
Plot the response of the following state-space model:
Take the following initial condition:
a = [-0.5572, -0.7814; 0.7814, 0]; c = [1.9691 6.4493]; x0 = [1 ; 0]; sys = ss(a,[],c,[]); initial(sys,x0)
Consider the following two-input, two-output dynamic system.
Convert the sys to state-space form since initial condition response plots are supported only for state-space models.
sys = ss([0, tf([3 0],[1 1 10]) ; tf([1 1],[1 5]), tf(2,[1 6])]); size(sys)
State-space model with 2 outputs, 2 inputs, and 4 states.
The resultant state-space model has four states. Hence, provide an initial condition vector with four elements.
x0 = [0.3,0.25,1,4];
Create the initial condition response plot.
initial(sys,x0);

The resultant plot contains two subplots - one for each output in sys.
For this example, examine the initial condition response of the following zero-pole-gain model and limit the plot to tFinal = 15 s.
First, convert the zpk model to an ss model since initial only supports state-space models.
sys = ss(zpk(-1,[-0.2+3j,-0.2-3j],1)*tf([1 1],[1 0.05])); tFinal = 15; x0 = [4,2,3];
Now, create the initial conditions response plot.
initial(sys,x0,tFinal);

For this example, plot the initial condition responses of three dynamic systems.
First, create the three models and provide the initial conditions. All the models should have the same number of states.
rng('default');
sys1 = rss(4);
sys2 = rss(4);
sys3 = rss(4);
x0 = [1,1,1,1];Plot the initial condition responses of the three models using time vector t that spans 5 seconds.
t = 0:0.1:5; initial(sys1,'r--',sys2,'b',sys3,'g-.',x0,t)

Extract the initial condition response data of the following state-space model with two states:
Use the following initial conditions:
a = [-0.5572, -0.7814; 0.7814, 0]; c = [1.9691 6.4493]; x0 = [1 ; 0]; sys = ss(a,[],c,[]); [y,tOut,x] = initial(sys,x0);
The array y has as many rows as time samples (length of tOut) and as many columns as outputs. Similarly, x has rows equal to the number of time samples (length of tOut) and as many columns as states.
For this example, extract the initial condition response data of a state-space model with 6 states, 3 outputs and 2 inputs.
First, create the model and provide the initial conditions.
rng('default');
sys = rss(6,3,2);
x0 = [0.1,0.3,0.05,0.4,0.75,1];Extract the initial condition responses of the model using time vector t that spans 15 seconds.
t = 0:0.1:15; [y,tOut,x] = initial(sys,x0,t);
The array y has as many rows as time samples (length of tOut) and as many columns as outputs. Similarly, x has rows equal to the number of time samples (length of tOut) and as many columns as states.
For this example, throttleLPV.m that defines the dynamics of a nonlinear engine throttle which behaves linearly in the 15 degrees to 90 degrees opening range.
Use lpvss to create the model. This model is parameterized by the throttle angle, which is the first state of the model.
c0 = 50;
k0 = 120;
K0 = 1e4;
b0 = 4e4;
yf = 15*K0/(k0+K0);
Ts = 0;
sys = lpvss("x1",@(t,p) throttleLPV(p,c0,k0,b0,K0),Ts,0,15);You can compute the initial response for this model along a trajectory .
Compute the response when you start at the lower end of linear range with a small angular velocity. Specify the parameter trajectory and find the initial condition using findop.
pFcn = @(t,x,u)x(1); xinit = [15;10]; pinit = xinit(1); t = linspace(0,0.6,500); ic = findop(sys,t(1),pinit,x=xinit); y = initial(sys,ic,t,pFcn); plot(t,y)

Compute the response when you start at the lower end of linear range with enough angular velocity to hit the upper end of this range.
xinit2 = [15;5e3]; pinit2 = xinit2(1); t2 = linspace(0,1,1000); ic2 = findop(sys,t2(1),pinit2,x=xinit2); y2 = initial(sys,ic2,t2,pFcn); plot(t2,y2)

View the data function.
type throttleLPV.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = throttleLPV(x1,c,k,b,K) % LPV representation of engine throttle dynamics. % Ref: https://www.mathworks.com/help/sldo/ug/estimate-model-parameter-values-gui.html % x1: scheduling parameter (throttle angle; first state of the model) % c,k,b,K: physical parameters A = [0 1; -k -c]; B = [0; b]; C = [1 0]; D = 0; E = []; Delays = []; x0 = []; u0 = []; y0 = []; % Nonlinear displacement value NLx = max(90,x1(1))-90+min(x1(1),15)-15; % Capture the nonlinear contribution as a state-derivative offset dx0 = [0;-K*NLx];
Create a state-space model with complex coefficients.
A = [-2-2i -2;1 0]; B = [2;0]; C = [0 0.5+2.5i]; D = 0; sys = ss(A,B,C,D);
Compute the initial-condition response of the system to an arbitrary starting state.
ic = [1 2]; [y,t] = initial(sys,ic);
The resulting response data contains complex output values.
y
Input Arguments
Output Arguments
Tips
When you need additional plot customization options, use
initialplotinstead.Plots created using
initialdo not support multiline titles or labels specified as string arrays or cell arrays of character vectors. To specify multiline titles and labels, use a single string with anewlinecharacter.initial(sys) title("first line" + newline + "second line");
Version History
Introduced before R2006aSee Also
initialplot | impulse | lsim | Linear System Analyzer | step