zp2ctf
Convert zero-pole-gain filter parameters to cascaded transfer function form
Since R2024a
Description
[
computes the second-order Cascaded Transfer Functions (CTF) of a filter system described by its zeros B,A] = zp2ctf(z,p)z and poles
p.
[
specifies additional options using name-value arguments.B,A] = zp2ctf(___,Name=Value)
Examples
Compute the cascaded transfer function of a discrete-time system from its zeros and poles.
z = [-1 -0.5+0.5i -0.5-0.5i]; p = [0.77 0.9i -0.9i -0.3+0.4i -0.3-0.4i]; [b,a] = zp2ctf(z,p)
b = 3×3
0 1.0000 0
0 1.0000 1.0000
1.0000 1.0000 0.5000
a = 3×3
1.0000 -0.7700 0
1.0000 0.6000 0.2500
1.0000 0 0.8100
Convert a stopband filter represented with zeros, poles, and gain to cascaded transfer-function form.
Get the zeros, poles, and gain of a 16th-order stopband Butterworth filter with stopband normalized frequencies of 0.35rad/sample and 0.5rad/sample.
[z,p,k] = butter(16,[0.35 0.5],"stop");Compute the second-order cascaded transfer function coefficients. Plot the filter frequency response.
[ctfB,ctfA] = zp2ctf(z,p,k); filterAnalyzer(ctfB,ctfA)
![]()
Design a highpass filter and compute the zeros, poles, and gain. Convert a zero-pole-gain filter representation to cascaded transfer function. Customize the conversion with pole sorting and gain scaling options.
Design a 10th-order type-II Chebyshev highpass filter sampled at 2000 Hz, with a cutoff frequency of 600 Hz and a stopband attenuation of 50 dB. Observe the z-plane showing five pairs of poles with a distance from the origin that ranges from 0 to 1.
[z,p,k] = cheby2(10,50,600/(2000/2),"high");
zplane(z,p,k)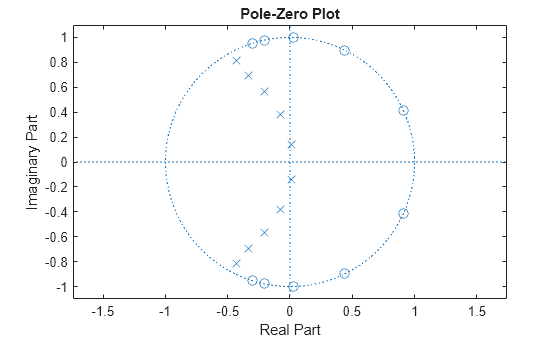
Convert the zero-pole-gain filter representation to cascaded transfer function form. Sort the filter sections in descending order using the distance between the poles and the origin. Specify the gain scaling of the filter sections using the infinity norm. List the pole-origin distances for all the filter sections.
[ctfBs,ctfAs] = zp2ctf(z,p,k,Direction="down",Scale="inf")
ctfBs = 5×3
0.6705 0.3993 0.6705
0.6851 0.2758 0.6851
0.5190 -0.0281 0.5190
0.3424 -0.3002 0.3424
0.2235 -0.4075 0.2235
ctfAs = 5×3
1.0000 0.8652 0.8531
1.0000 0.6592 0.5958
1.0000 0.4056 0.3591
1.0000 0.1474 0.1505
1.0000 -0.0262 0.0189
% Pole-Origin Distances for all Filter Sections. numSections = size(ctfBs,1); poleRadius = zeros(numSections,2); for iter = 1:numSections poleRadius(iter,:) = abs(roots(ctfAs(iter,:))'); end table((1:numSections)',poleRadius, ... VariableNames=["Section" "Pole-Origin Distances"])
ans=5×2 table
Section Pole-Origin Distances
_______ _____________________
1 0.92363 0.92363
2 0.77188 0.77188
3 0.59926 0.59926
4 0.38792 0.38792
5 0.13735 0.13735
The cascade sections are sorted in descending order by pole-origin distance.
Convert the zero-pole-gain representation of a Butterworth filter to cascaded transfer function form.
Design a 6th-order Butterworth lowpass filter with a normalized cutoff frequency of 0.2rad/sample.
[z,p,k] = butter(6,0.2);
Obtain the numerator and denominator coefficients of the cascaded transfer function in the form of second-order and fourth-order cascaded transfer functions. Plot the frequency response of both cascaded transfer functions. Observe that both cascaded transfer functions yield the same frequency response.
% Second-order
[num2,den2,g2] = zp2ctf(z,p,k)num2 = 3×3
1 2 1
1 2 1
1 2 1
den2 = 3×3
1.0000 -1.0321 0.2757
1.0000 -1.1430 0.4128
1.0000 -1.4044 0.7359
g2 = 3.4054e-04
% Fourth-order
[num4,den4,g4] = zp2ctf(z,p,k,SectionOrder=4)num4 = 2×5
1 2 1 0 0
1 4 6 4 1
den4 = 2×5
1.0000 -1.0321 0.2757 0 0
1.0000 -2.5474 2.7539 -1.4209 0.3038
g4 = 3.4054e-04
% Frequency response
filterAnalyzer(num2,den2,num4,den4)![]()
Input Arguments
Name-Value Arguments
Output Arguments
More About
Algorithms
The zp2ctf function computes the numerator and denominator
coefficients of the cascaded-transfer-function sections from the zeros, poles, and gain of the
filter system. For an Nth-order filter system, there are (L!)2 possible combinations [1]. The variable
L is the nearest integer greater than or equal to N/2 or N/4 for second-order or fourth-order sections, respectively.
Customize the sorting criteria for pairing of the zeros and poles in the cascaded sections
by specifying Direction to start with the poles and zeros closest to the
origin of the z-plane ("up"), or closest to the unit circle
("down"). Perform gain scaling across the cascaded sections by specifying
Scale. Customize the order of the cascaded sections by setting
SectionOrder to either 2 or 4 to
generate either second-order or fourth-order cascaded sections, respectively.
The output arguments B and A contain the
second-order or fourth-order cascaded transfer function coefficients of the filter system
distributed in L rows.
Each row of
AandBlists the coefficients in each section.The function returns the first column of
Aas 1, thusA(1)=1whenAis a row vector.If you specify to return
gS,zp2ctfnormalizes the numerator coefficients so that the first column ofBis 1, and returns the overall system gain ingS. Thus,B(1)=1whenBis a row vector.If you do not specify to return
gS,zp2ctffirst normalizes the numerator coefficients so that the first column ofBis 1, and then uniformly multipliessgn(gS)*gS^(1/L)to the normalized numerator coefficients, so that the first column ofBissgn(gS)*gS^(1/L). Thus,B(1)=gSwhenBis a row vector.
If you specify second-order sections or do not specify
SectionOrder, thezp2ctffunction returns the L-by-3 matricesBandA, where the last two columns correspond to the z–1 and z–2 terms for each cascaded section of the filter system.If you specify fourth-order sections, the
zp2ctffunction returns the L-by-5 matricesBandA, where the last two columns correspond to the z–3 and z–4 terms for each cascaded section of the filter system.
References
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.
Extended Capabilities
Version History
Introduced in R2024a
See Also
filterAnalyzer | scaleFilterSections | sos2ctf | zp2sos | zp2ss | zp2tf