digitalFilter
Digital filter
Description
Use a digitalFilter object to store digital filter coefficients
and, if available, filter design specifications. You can use the object to analyze the filter
response and to filter signals.
Use
filterin the formdataOut = filter(d,dataIn)to filter a signal with adigitalFilterobjectd. You can also use thefiltfiltandfftfiltfunctions withdigitalFilterobjects. For a complete list of functions that you can use withdigitalFilterobjects, see Object Functions.Use Filter Analyzer to visualize a
digitalFilterobject.Use Filter Designer to import and modify a
digitalFilterobject.
Creation
Create digitalFilter objects that
contain coefficients representing Cascaded Transfer Functions (CTF). (since R2026a)
Note
To create a digitalFilter object with design specifications, use
designfilt or the Filter Designer app.
Use the syntax
d = designfilt(response,Name=Value)to design a digital filterdwith response typeresponseand design specifications listed as name-value arguments.Use the syntax
designfilt(d)or Filter Designer to edit an existing filter,d. The filter properties are otherwise read-only.
Description
d = digitalFilter(B,A)d with CTF numerator coefficients
B and CTF denominator coefficients A. The
filter uses normalized frequencies.
Input Arguments
Properties
Object Functions
Examples
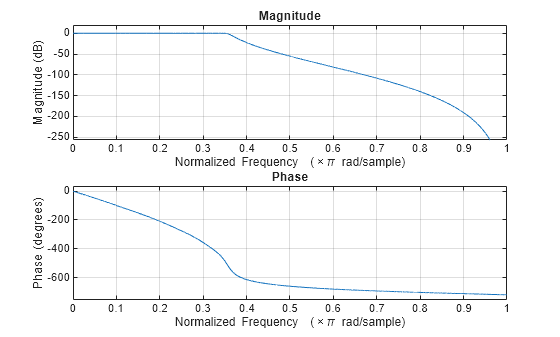
Design a lowpass IIR filter with order 8, passband frequency 35 kHz, and passband ripple 0.2 dB. Specify a sample rate of 200 kHz. Visualize the frequency response of the filter.
lpFilt = designfilt("lowpassiir",FilterOrder=8, ... PassbandFrequency=35e3,PassbandRipple=0.2, ... SampleRate=200e3); freqz(lpFilt)
Use the filter you designed to filter a 1000-sample random signal.
dataIn = randn(1000,1); dataOut = filter(lpFilt,dataIn);
Output the filter coefficients, expressed as cascaded transfer functions.
ctfNum = lpFilt.Numerator
ctfNum = 4×3
0.2666 0.5333 0.2666
0.1943 0.3886 0.1943
0.1012 0.2023 0.1012
0.0318 0.0636 0.0318
ctfDen = lpFilt.Denominator
ctfDen = 4×3
1.0000 -0.8346 0.9073
1.0000 -0.9586 0.7403
1.0000 -1.1912 0.5983
1.0000 -1.3810 0.5090
Since R2026a
Design bandpass IIR digital filters and filter a sinusoidal signal with harmonics.
Design a 10th-order bandpass IIR elliptic filter with passband edge frequencies of [0.3, 0.5] radians/sample, passband ripple of 0.1 dB, and stopband attenuation of 50 dB. Obtain the filter coefficients in CTF format.
N = 10; Rp = 0.1; Rs = 50; Wp = [0.3 0.5]; [B,A] = ellip(N/2,Rp,Rs,Wp,"bandpass","ctf");
Create a digital filter object from the filter coefficients. Set the sample rate to 1000 Hz.
Fs = 1000; dCoeff = digitalFilter(B,A,SampleRate=Fs);
Create a digital filter object from the filter specifications.
dSpecs = designfilt("bandpassiir",SampleRate=Fs, ... FilterOrder=N,DesignMethod="ellip", ... PassbandFrequency1=Wp(1)*Fs/2,PassbandFrequency2=Wp(2)*Fs/2, ... StopbandAttenuation1=Rs,PassbandRipple=Rp,StopbandAttenuation2=Rs);
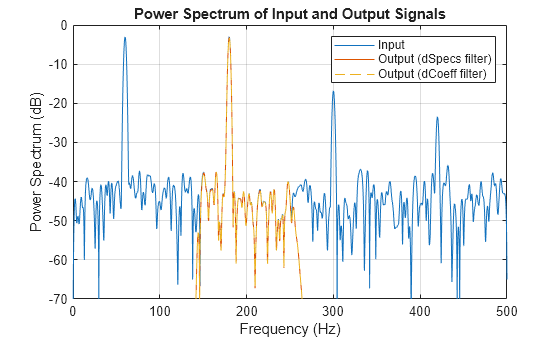
Generate a sinusoidal signal with an amplitude of 1 V and a frequency of 60 Hz, and add third-, fifth-, and seventh-order harmonics. The harmonic amplitudes are 1 V, 0.2 V, and 0.1 V, respectively. Sample the signal for 1 second.
rng("default")
a = [1 1 0.2 0.1];
f = 60*[1 3 5 7];
t = (0:1/Fs:1)';
x = cos(2*pi*f.*t)*a' + 0.1*randn(size(t));Filter the signal using the digitalFilter objects created from specifications and from CTF coefficients. Compare the input and output signals.
ySpecs = filtfilt(dSpecs,x); yCoeff = filtfilt(dCoeff,x); pspectrum([x ySpecs yCoeff],Fs) title("Power Spectrum of Input and Output Signals") legend(["Input" "Output (dSpecs filter)" "Output (dCoeff filter)"]) set(gca().Children(1),LineStyle="--") ylim([-70 0])
More About
References
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.