gapmetric
Gap metric and Vinnicombe (nu-gap) metric for distance between two systems
Description
[
computes the gap and Vinnicombe (ν-gap) metrics for the distance between
dynamic systems gap,nugap] = gapmetric(P1,P2)P1 and P2. The gap metric values
satisfy 0 ≤ nugap ≤ gap ≤ 1. Values close to zero imply that any controller that stabilizes
P1 also stabilizes P2 with similar closed-loop
gains.
Examples
Compute Gap Metrics for Stable and Unstable Plant Models
Create two plant models. One plant, P1, is an unstable first-order system with transfer function 1/(s–0.001). The other plant, P2, is stable, with transfer function 1/(s +0.001).
P1 = tf(1,[1 -0.001]); P2 = tf(1,[1 0.001]);
Despite the fact that one plant is unstable and the other is stable, these plants are close as measured by the gap and nugap metrics.
[gap,nugap] = gapmetric(P1,P2)
gap = 0.0021
nugap = 0.0020
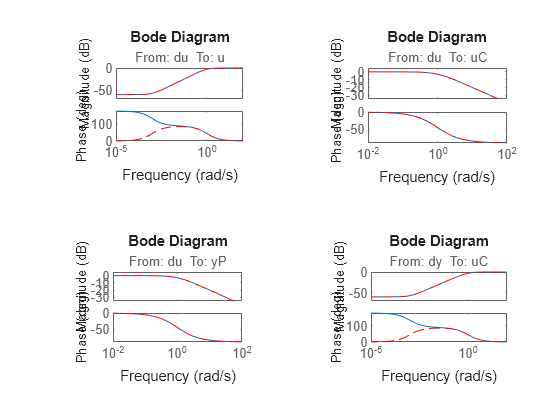
The gap is very small compared to 1. Thus a controller that yields a stable closed-loop system with P2 also tends to stabilize P1. For instance, the feedback controller C = 1 stabilizes both plants and renders nearly identical closed-loop gains. To see this, examine the sensitivity functions of the two closed-loop systems.
C = 1; H1 = loopsens(P1,C); H2 = loopsens(P2,C); subplot(2,2,1); bode(H1.Si,'-',H2.Si,'r--'); subplot(2,2,2); bode(H1.Ti,'-',H2.Ti,'r--'); subplot(2,2,3); bode(H1.PSi,'-',H2.PSi,'r--'); subplot(2,2,4); bode(H1.CSo,'-',H2.CSo,'r--');
Next, consider two stable plant models that differ by a first-order system. One plant, P3, is the transfer function 50/(s+50), and the other plant, P4, is the transfer function [50/(s+50)]*8/(s+8).
P3 = tf(50,[1 50]); P4 = tf(8,[1 8])*P3; figure bode(P3,P4)

Although the two systems have similar high-frequency dynamics and the same unity gain at low frequency, by the gap and nugap metrics, the plants are fairly far apart.
[gap,nugap] = gapmetric(P3,P4)
gap = 0.6148
nugap = 0.6147
Compute Gap Metric and Stability Margin
Consider a plant and a stabilizing controller.
P1 = tf([1 2],[1 5 10]); C = tf(4.4,[1 0]);
Compute the stability margin for this plant and controller.
b1 = ncfmargin(P1,C)
b1 = 0.1961
Next, compute the gap between P1 and the perturbed plant, P2.
P2 = tf([1 1],[1 3 10]); [gap,nugap] = gapmetric(P1,P2)
gap = 0.1391
nugap = 0.1390
Because the stability margin b1 = b(P1,C) is greater than the gap between the two plants, C also stabilizes P2. As discussed in Gap Metrics and Stability Margins, the stability margin b2 = b(P2,C) satisfies the inequality asin(b(P2,C)) ≥ asin(b1)-asin(gap). Confirm this result.
b2 = ncfmargin(P2,C); [asin(b2) asin(b1)-asin(gap)]
ans = 1×2
0.0997 0.0579
Input Arguments
Output Arguments
More About
References
[1] Georgiou, Tryphon T. “On the Computation of the Gap Metric.” Systems & Control Letters 11, no. 4 (October 1988): 253–57. https://doi.org/10.1016/0167-6911(88)90067-9.
[2] Zhou, K., Doyle, J.C., Essentials of Robust Control. London, UK: Pearson, 1997.
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)