wcgain
Worst-case gain of uncertain system
Syntax
Description
[ calculates the worst-case
peak gain of the uncertain system wcg,wcu]
= wcgain(usys)usys. Peak
gain refers to the maximum gain over frequency (H∞ norm).
For multi-input, multi-output (MIMO) systems, gain refers to the largest
singular value of the frequency response matrix. (See sigma for more information about singular
values.) The structure wcg contains upper and
lower bounds on the worst-case gain and the critical frequency at
which the lower bound peaks. (See Worst-Case Gain.) The structure wcu contains
the values of the uncertain elements of usys that
cause the worst-case peak gain.
[ restricts
worst-case computation to the frequencies specified by wcg,wcu]
= wcgain(usys,w)w.
If
wis a cell array of the form{wmin,wmax}, thenwcgainreturns the worst-case gain in the interval betweenwminandwmax.If
wis a vector of frequencies, thenwcgaincalculates the worst-case gain at the specified frequencies only, and returns the worst of those gains.
Examples
Consider a control system whose plant is nominally an integrator with some additive dynamic uncertainty. Create a model of the plant.
delta = ultidyn('delta',[1 1],'bound',0.4); G = tf(1,[1 0]) + delta;
Create a PD controller for the model. Suppose you want to examine the worst-case disturbance rejection performance. Build the closed-loop sensitivity function to examine the worst-case gain of a disturbance at the plant input.
C = pid(2,0,-0.04,0.02); S = feedback(1,G*C);
Because of the uncertainty, the frequency response of this transfer function falls within some envelope. The frequency-response magnitude of a few samples of the system gives a sense of that envelope.
bodemag(S)
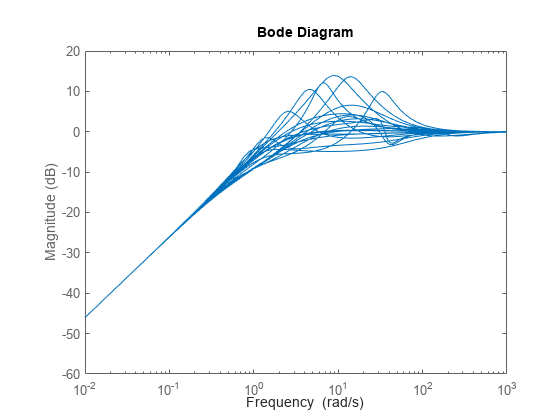
Each sample has a different peak gain. Find the highest peak-gain value within the envelope and the corresponding values for the uncertain elements.
[wcg,wcu] = wcgain(S); wcg
wcg = struct with fields:
LowerBound: 5.1036
UpperBound: 5.1140
CriticalFrequency: 10.7241
The LowerBound and UpperBound fields of wcg show that the worst-case peak gain is around 5.1. This gain occurs at the critical frequency around 10.6 rad/s.
The output wcu is a structure that contains the perturbation to delta that causes the worst-case gain. Confirm the result by substituting this value into the sensitivity function.
Swc = usubs(S,wcu); getPeakGain(Swc)
ans = 5.1037
Because the system has dynamic uncertainty delta with gain not exceeding 0.4, the worst-case value of delta should be a system with peak gain of 0.4. Confirm this result.
getPeakGain(wcu.delta)
ans = 0.4000
Consider a model of a control system containing uncertain elements.
k = ureal('k',10,'Percent',40); delta = ultidyn('delta',[1 1]); G = tf(18,[1 1.8 k]) * (1 + 0.5*delta); C = pid(2.3,3,0.38,0.001); CL = feedback(G*C,1);
By default, wcgain returns only the worst-case peak gain over all frequencies. To obtain worst-case gain values at multiple frequencies, use the 'VaryFrequency' option of wcOptions. For example, compute the highest possible gain of the system at frequency points between 0.1 and 10 rad/s.
opts = wcOptions('VaryFrequency','on'); [wcg1,wcu1,info1] = wcgain(CL,{0.1,10},opts); info1
info1 = struct with fields:
Model: 1
Frequency: [19×1 double]
Bounds: [19×2 double]
WorstPerturbation: [19×1 struct]
Sensitivity: [1×1 struct]
BadUncertainValues: [19×1 struct]
ArrayIndex: 1
wcgain returns the vector of frequencies in the info output, in the Frequencies field. info.Bounds contains the upper and lower bounds on the worst-case gain at each frequency. Use these values to plot the frequency dependence of the worst-case gain.
semilogx(info1.Frequency,info1.Bounds) title('Worst-Case Gain vs. Frequency') ylabel('Gain') xlabel('Frequency') legend('Lower bound','Upper bound','Location','northwest')
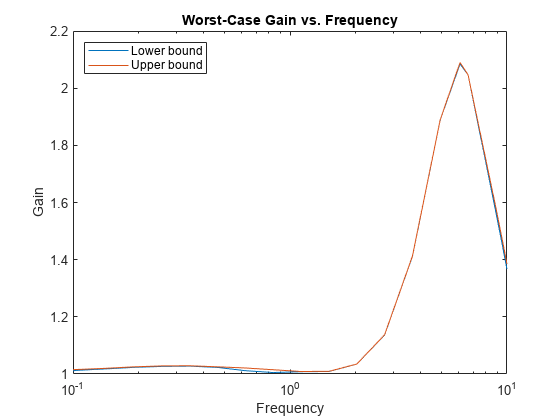
The curve shows the high-gain envelope for all systems within the uncertainty ranges of CL. You can also use wcsigmaplot to plot this envelope along with samples of the system.
When you use the 'VaryFrequency' option, wcgain chooses frequency points automatically. The frequencies it selects are guaranteed to include the frequency at which the worst-case gain is highest (within the specified range). Display the returned frequency values to confirm that they include the critical frequency.
info1.Frequency
ans = 19×1
0.1000
0.1061
0.1425
0.1914
0.2572
0.3455
0.4642
0.6236
0.8377
1.1253
1.5118
2.0309
2.7283
3.6652
4.9239
⋮
wcg1.CriticalFrequency
ans = 6.0749
Alternatively, instead of using 'VaryFrequency', you can specify particular frequencies at which to compute the worst-case gains. info.Bounds contains the worst-case gains at all specified frequencies.
w = logspace(-1,1,24); [wcg2,wcu2,info2] = wcgain(CL,w); semilogx(w,info2.Bounds) title('Worst-Case Gain vs. Frequency') ylabel('Gain') xlabel('Frequency') legend('Lower bound','Upper bound','Location','northwest')
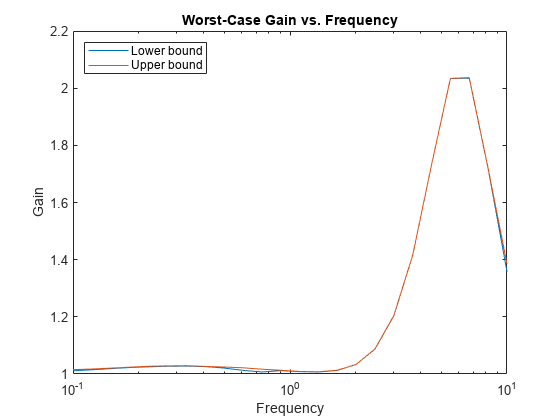
When you provide the frequency grid in this way, the results are not guaranteed to include the overall worst-case gain, which might fall between specified frequency points. To see this, examine wcg1 and wcg2, which contain the bounds for the two approaches.
wcg1
wcg1 = struct with fields:
LowerBound: 2.0848
UpperBound: 2.0897
CriticalFrequency: 6.0749
wcg2
wcg2 = struct with fields:
LowerBound: 2.0349
UpperBound: 2.0370
CriticalFrequency: 6.7002
wcg1, computed using VaryFrequency, finds a higher peak gain than the specified frequency grid.
Consider a feedback loop with a first-order plant and a PI controller. The time constant of the plant is uncertain, and the feedback loop accounts for unmodeled dynamic uncertainty. Compute the worst-case gain of the sensitivity function Si at the plant inputs. Use the 'Sensitivity' option of wcOptions to compute how sensitive this worst-case gain is to each uncertain element.
% Create uncertain system and controller delta = ultidyn('delta',[1 1]); tau = ureal('tau',5,'range',[4 6]); P = tf(1,[tau 1])*(1+0.25*delta); C = pid(4,4); opt = wcOptions('Sensitivity','on'); Si = inv(1 + C*P); [wcg,~,info] = wcgain(Si,opt);
The Sensitivity field of the info output structure includes data that reflects how much the maximum gain of the input sensitivity function changes with each uncertain element.
info.Sensitivity
ans = struct with fields:
delta: 44
tau: 9
This result tells you that if the uncertainty range of delta increases by 10%, the peak input sensitivity increases by about 4.4%. Similarly, a 10% increase in the uncertainty range of tau causes about a 0.9% increase in the peak input sensitivity.
Specifying certain options for the structured-singular-value computation that underlies the worst-gain computation can yield better results in some cases. For example, consider a sample plant and controller.
load('wcgExampleData.mat')This command loads gPlant, a MIMO plant with 10 outputs, 8 inputs, and 11 uncertain elements. It also loads Kmu, a state-space controller model. Form a closed-loop system with these models, and examine the worst-case gain.
CL = lft(gPlant,Kmu); [wcg,wcu] = wcgain(CL); wcg
wcg = struct with fields:
LowerBound: 10.8742
UpperBound: 11.2135
CriticalFrequency: 6.6794
There is a large difference between the lower and upper bounds on the worst-case gain. To get a better estimate of the actual worst-case gain, increase the number of restarts that wcgain uses for computing of the worst-case perturbation and associated lower bound. Doing so can result in a tighter lower bound. This option does not affect the upper-bound calculation.
opt = wcOptions('MussvOptions','m3'); [wcg,wcu] = wcgain(CL,opt); wcg
wcg = struct with fields:
LowerBound: 10.8742
UpperBound: 11.2135
CriticalFrequency: 6.6794
The difference between the lower bound and upper bound on the worst-case gain is much smaller. The critical frequency is different as well.
Input Arguments
Output Arguments
More About
By default, wcgain returns
the peak gain (or peak singular value, for MIMO systems) achievable
within the uncertainty range, over all frequencies (or the frequencies
specified by w). You can obtain the peak gain
as a function of frequency using the VaryFrequency option
of wcOptions.
To understand the difference, consider the following illustration, representing the magnitude of the frequency response of an uncertain system.
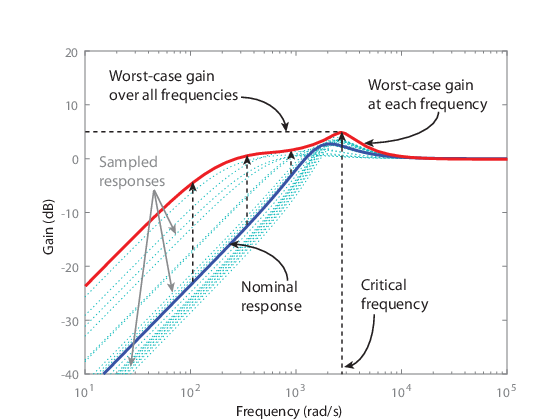
The dark blue curve is the nominal response of the system. The
light blue curves show various sampled responses of the system. The wcg output
of wcgain contains the bounds on the worst-case
gain over all frequencies, about 5 dB in the illustration. The frequency
at which this gain occurs is the critical frequency, also returned
in wcg.
If you set the VaryFrequency option of wcOptions to
'on', then wcgain also calculates the
maximum gain at each frequency point, shown by the red curve.
wcgain returns these values in
info.Bounds. See Worst-Case Gain at Frequencies in a Range for an example. You can also
use wcsigmaplot to visualize the worst-case gain as a function of
frequency.
Algorithms
Computing the worst-case gain at a particular frequency is equivalent to computing the structured singular value, μ, for some appropriate block structure (μ-analysis).
For uss and genss models, wcgain(usys) and wcgain(usys,{wmin,wmax}) use
an algorithm that finds the worst-case gain across frequency. This
algorithm does not rely on frequency gridding and is not adversely
affected by sharp peaks of the μ structured
singular value. See Getting Reliable Estimates of Robustness Margins for
more information.
For ufrd and genfrd models, wcgain computes
the μ lower and upper bounds at each frequency
point. This computation offers no guarantee between frequency points
and can be inaccurate if the uncertainty gives rise to sharp resonances.
The syntax wcgain(uss,w), where w is
a vector of frequency points, is the same as wcgain(ufrd(uss,w)) and
also relies on frequency gridding to compute the worst-case gain.
In general, the algorithm for state-space models is faster and
safer than the frequency-gridding approach. In some cases, however,
the state-space algorithm requires many μ calculations.
In those cases, specifying a frequency grid as a vector w can
be faster, provided that the worst-case gain varies smoothly with
frequency. Such smooth variation is typical for systems with dynamic
uncertainty.
Version History
Introduced before R2006a