generalizedInverseKinematics
Create multiconstraint inverse kinematics solver
Description
The generalizedInverseKinematics
System object™ solves for a joint configuration for a specified rigidBodyTree object that satisfies a set of nonlinear kinematic
constraints or returns the closest feasible solution when the solver cannot satisfy all
constraints.
Specify the constraint types, ConstraintInputs, before calling
the object. To change constraint inputs after calling the object, call
release(.gik)
Specify the constraint inputs as constraint objects and call generalizedInverseKinematics with these objects passed into it. To create
constraint objects, use the following objects:
If your only constraint is the end-effector position and orientation, consider using
inverseKinematics as your solver
instead.
For closed-form analytical inverse kinematics solutions, see analyticalInverseKinematics.
To solve the generalized inverse kinematics constraints:
Create the
generalizedInverseKinematicsobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
gik = generalizedInverseKinematicsrigidBodyTree model and the
ConstraintInputs property before using this
solver.
gik = generalizedInverseKinematics(PropertyName=Value)generalizedInverseKinematics(RigidBodyTree=rigidbodytree,ConstraintInputs=inputTypes)
creates a generalized inverse kinematics solver with the rigid body tree model
and the expected constraint inputs specified.
Properties
Usage
Description
[
finds a joint configuration, configSol,solInfo]
= gik(initialguess,constraintObj,...,constraintObjN)configSol, based on the
initial guess and a comma-separated list of constraint description objects. The
number of constraint descriptions depends on the
ConstraintInputs property.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
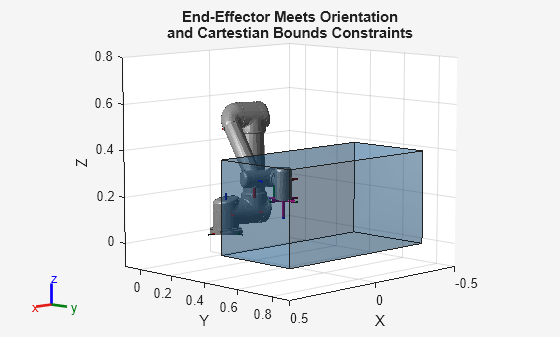
Use generalized inverse kinematics (GIK), with the fmincon SQP solver algorithm, to find configurations where the end effector is pointing down within certain boundaries.
Load a robot model and create a GIK solver. Set the solver algorithm to fmincon SQP.
robot = loadrobot("universalUR5",DataFormat="row"); gik = generalizedInverseKinematics( ... RigidBodyTree=robot, ... SolverAlgorithm="fminconsqp", ... ConstraintInputs={"orientation","cartesian"});
Define an orientation target constraint and a Cartesian bounds constraint.
ee = robot.BodyNames{end};
oriTgt = constraintOrientationTarget(ee);
oriTgt.TargetOrientation = eul2quat([0 pi 0],"ZYX");
cartBnds = constraintCartesianBounds(ee);
cartBnds.Bounds = [-0.4 0.4; 0.4 0.8; 0.0 0.4];Set an initial guess configuration, and solve for the configuration that satisfies both the orientation target and Cartesian bounds constraints.
initGuessConfig = [pi/2 -pi/3 0 0 0 0]; [config,solutionInfo] = gik(initGuessConfig,oriTgt,cartBnds);
Visualize the configuration returned by the solver, and use the exampleHelperShowCartesianBounds helper function to visualize the Cartesian bounds as a transparent patch.
show(robot,config); title(["End-Effector Meets Orientation","and Cartestian Bounds Constraints"]); axis([-0.5 0.5 -0.1 0.9 -0.1 0.8]) exampleHelperShowCartesianBounds(cartBnds.Bounds,0.3) hold off
Create a generalized inverse kinematics solver that holds a robotic arm at a specific location and points toward the robot base. Create the constraint objects to pass the necessary constraint parameters into the solver.
Load KUKA iiwa 14 robot model from the Robotics System Toolbox™ loadrobot, returned as a rigidBodyTree object.
manipulator = loadrobot("kukaIiwa14");Create the System object™ for solving generalized inverse kinematics.
gik = generalizedInverseKinematics;
Configure the System object to use the KUKA LBR robot.
gik.RigidBodyTree = manipulator;
Tell the solver to expect a constraintAiming and constraintPositionTarget object as the constraint inputs.
gik.ConstraintInputs = {"position","aiming"};Create the two constraint objects.
The origin of the body named
iiwa_link_ee_kukais located at[0.0 0.5 0.5]relative to the robot's base frame.The z-axis of the body named
iiwa_link_ee_kukapoints toward the origin of the robot's base frame.
posTgt = constraintPositionTarget("iiwa_link_ee_kuka"); posTgt.TargetPosition = [0.0 0.5 0.5]; aimCon = constraintAiming("iiwa_link_ee_kuka"); aimCon.TargetPoint = [0.0 0.0 0.0];
Find a configuration that satisfies the constraints. You must pass the constraint objects into the System object in the order in which they were specified in the ConstraintInputs property. Specify an initial guess at the robot configuration.
q0 = homeConfiguration(manipulator); % Initial guess for solver
[q,solutionInfo] = gik(q0,posTgt,aimCon);Visualize the configuration returned by the solver.
show(manipulator,q);
title(sprintf("Solver status: %s", solutionInfo.Status))
axis([-0.75 0.75 -0.75 0.75 -0.5 1])
Plot a line segment from the target position to the origin of the base. The origin of the tool0 frame coincides with one end of the segment, and its z-axis is aligned with the segment.
hold on plot3([0.0 0.0],[0.5 0.0],[0.5 0.0],"--o") hold off

Extended Capabilities
Version History
Introduced in R2017aSee Also
Objects
analyticalInverseKinematics|inverseKinematics|constraintPoseTarget|constraintPositionTarget|constraintAiming|constraintCartesianBounds|constraintJointBounds|constraintOrientationTarget|constraintDistanceBounds|constraintFixedJoint|constraintPrismaticJoint|constraintRevoluteJoint