marginalizeFactor
Syntax
Description
factorID = marginalizeFactor(fg,factorIDs)
[
optionally returns the IDs of any nodes that were removed by marginalizing the specified
factors.factorID,removedNodeIDs] = marginalizeFactor(fg,factorIDs)
Examples
Create a factor graph and load initial state data.
fg = factorGraph;
load exampleSimple3DFGStateData.matFor simplicity, create one relative measurement to use for all pose factors.
relMeasure = [0.75 0 0 eul2quat([pi/8 -pi/12 0],"ZYX")];Create a four-pose factor graph using three pose factors.
nIDs = generateNodeID(fg,3,"factorTwoPoseSE3") + 1; fRelPose = factorTwoPoseSE3(nIDs,Measurement=repmat(relMeasure,3,1)); fRelPoseID = addFactor(fg,fRelPose); nIDs = nodeIDs(fg,NodeType="POSE_SE3"); % Get node IDs out of pose pair format nodeState(fg,nIDs,state(1:4,:)); % Set initial guess states of pose nodes
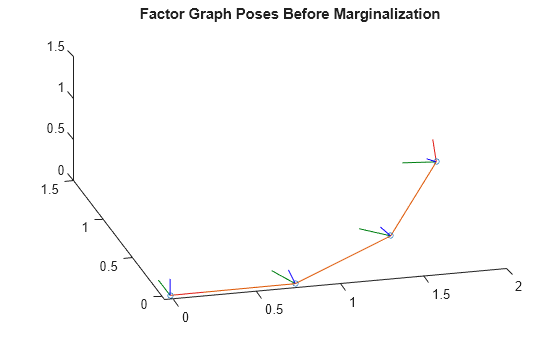
Add a prior factor to the first node, optimize, and then show the factor graph.
fPrior = factorPoseSE3Prior(nIDs(1),Measurement=[0 0 0 1 0 0 0]); fPriorPoseID = addFactor(fg,fPrior); optimize(fg); ax = show(fg,Orientation="on"); title("Factor Graph Poses Before Marginalization") axis([-0.05 2.0 -0.05 1.5 0 1.5]) view(-15,45)
Add a new pose at the end of the factor graph.
fRelPose2 = factorTwoPoseSE3([nIDs(end) nIDs(end)+1],Measurement=relMeasure);
fRelPoseID = [fRelPoseID addFactor(fg,fRelPose2)];
nodeState(fg,nIDs(end),state(end,:)); % Set the initial state of the new pose nodeMarginalize the first relative pose factor and the prior pose factor, which provides absolute pose information. The marginalization process removes the first pose node from the factor graph. This process reduces the size of the factor graph, but retains the information from the removed factors and nodes by replacing them with a marginal factor.
[fMarginalID,removedNodeID] = marginalizeFactor(fg,[fPriorPoseID fRelPoseID(1)]);
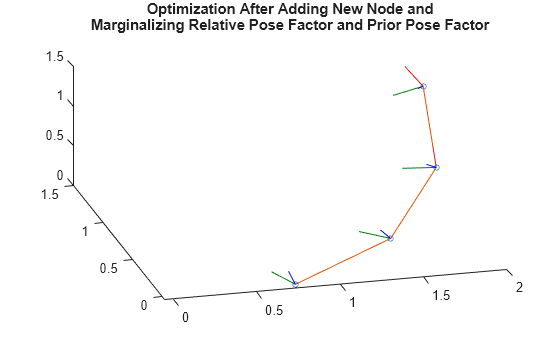
Optimize and show the factor graph. Note that the states of the second, third, fourth, and fifth nodes retain their positions because the graph optimization incorporates the new marginal factor, which includes the absolute pose information from the marginalized node and factors.
optimize(fg); show(fg,Parent=ax,Orientation="on"); title(["Optimization After Adding New Node and","Marginalizing Relative Pose Factor and Prior Pose Factor"]) axis([-0.05 2.0 -0.05 1.5 0 1.5]) view(-15,45)
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2025a