TuningGoal.MaxLoopGain
Maximum loop gain constraint for control system tuning
Description
Use TuningGoal.MaxLoopGain to enforce a maximum
loop gain and desired roll-off in a particular frequency band. Use this tuning goal with control
system tuning commands such as systune or
looptune.
This tuning goal imposes a maximum gain on the open-loop frequency response (L) at a specified location in your control system. You specify the maximum open-loop gain as a function of frequency (a maximum gain profile). For MIMO feedback loops, the specified gain profile is interpreted as an upper bound on the largest singular value of L.
When you tune a control system, the maximum gain profile is converted to a maximum gain constraint on the complementary sensitivity function, T) = L/(I + L).
The following figure shows a typical specified maximum gain profile (dashed line) and a resulting tuned loop gain, L (blue line). The shaded region represents gain profile values that are forbidden by this tuning goal. The figure shows that when L is much smaller than 1, imposing a maximum gain on T is a good proxy for a maximum open-loop gain.
TuningGoal.MaxLoopGain and TuningGoal.MinLoopGain specify only high-gain or low-gain constraints in certain
frequency bands. When you use these tuning goals, systune and
looptune determine the best loop shape near crossover. When the loop shape
near crossover is simple or well understood (such as integral action), you can use TuningGoal.LoopShape to specify that target loop shape.
Creation
Syntax
Description
Req = TuningGoal.MaxLoopGain(location,loopgain)loopgain. You can specify the maximum gain
profile as a smooth transfer function or sketch a piecewise error profile using an
frd model or the makeweight (Robust Control Toolbox) command. Only gain values smaller than 1 are enforced.
Input Arguments
Location at which the maximum open-loop gain is constrained, specified as a character vector or cell array of character vectors that identify one or more locations in the control system to tune. What loop-opening locations are available depends on what kind of system you are tuning:
If you are tuning a Simulink® model of a control system, you can use any linear analysis point marked in the model, or any linear analysis point in an
slTuner(Simulink Control Design) interface associated with the Simulink model. UseaddPoint(Simulink Control Design) to add analysis points to theslTunerinterface. For example, if theslTunerinterface contains an analysis pointu, you can use'u'to refer to that point when creating tuning goals. UsegetPoints(Simulink Control Design) to get the list of analysis points available in anslTunerinterface to your model.If you are tuning a generalized state-space (
genss) model of a control system, you can use anyAnalysisPointlocation in the control system model. For example, the following code creates a PI loop with an analysis point at the plant input'u'.AP = AnalysisPoint('u'); G = tf(1,[1 2]); C = tunablePID('C','pi'); T = feedback(G*AP*C,1);
When creating tuning goals, you can use
'u'to refer to the analysis point at the plant input. UsegetPointsto get the list of analysis points available in agenssmodel.
If location is a cell array of loop-opening locations, then the
maximum gain requirement applies to the resulting MIMO loop.
Maximum open-loop gain as a function of frequency.
You can specify loopgain as a smooth SISO transfer function
(tf, zpk, or ss model). Alternatively, you can sketch a
piecewise gain profile using a frd model or the makeweight (Robust Control Toolbox) command. For example, the following frd model
specifies a maximum gain of 1 (0 dB) at 1 rad/s, rolling off at a rate of –20 dB/dec up to 10
rad/s, and a rate of –40 dB/dec at higher frequencies.
loopgain = frd([1 1e-1 1e-3],[1 10 100]); bodemag(loopgain)

When you use an frd model to specify loopgain,
the software automatically maps your specified gain profile to a zpk
model. The magnitude of this model approximates the desired gain profile. Use
viewGoal(Req) to plot the magnitude of that zpk
model.
Only gain values smaller than 1 are enforced. For multi-input, multi-output (MIMO)
feedback loops, the gain profile is interpreted as a minimum roll-off requirement, which is
an upper bound on the largest singular value of L. For more information
about singular values, see sigma.
If you are tuning in discrete time (that is, using a genss model or
slTuner interface with nonzero Ts), you can specify
loopgain as a discrete-time model with the same Ts.
If you specify loopgain in continuous time, the tuning software
discretizes it. Specifying the loop gain in discrete time gives you more control over the
loop gain near the Nyquist frequency.
Frequency of maximum gain gmax, specified as a scalar value in
rad/s.
Use this argument to specify a maximum gain profile of the form loopgain =
K/s (integral action). The software chooses K such that the
gain value is gmax at the specified frequency,
fmax.
Maximum gain occurring at fmax, specified as a scalar absolute
value.
Use this argument to specify a maximum gain profile of the form loopgain =
K/s (integral action). The software chooses K such that the
gain value is gmax at the specified frequency,
fmax.
Properties
Examples
Create a tuning goal that limits the maximum open-loop gain of a feedback loop to a specified profile.
Suppose that you are tuning a control system that has a loop-opening location identified by PILoop. Limit the open-loop gain measured at that location to 1 (0 dB) at 1 rad/s, rolling off at a rate of -20 dB/dec up to 10 rad/s, and a rate of -40 dB/dec at higher frequencies. Use an frd model to sketch this gain profile.
loopgain = frd([1 1e-1 1e-3],[1 10 100]);
Req = TuningGoal.MaxLoopGain('PILoop',loopgain);The software converts loopgain into a smooth function of frequency that approximates the piecewise-specified gain profile. Display the tuning goal using viewGoal.
viewGoal(Req)

The dashed line shows the specified gain profile. The shaded region indicates where the tuning goal is violated, except that gain values greater than 1 are not enforced. Therefore, this tuning goal only specifies minimum roll-off rates at frequencies above 1 rad/s.
You can use Req as an input to looptune or systune when tuning the control system. Then use viewGoal(Req,T) to compare the tuned loop gain to the minimum gain specified in the tuning goal, where T represents the tuned control system.
Create a tuning goal that specifies a maximum loop gain of the form L = K / s. The maximum gain attains the value of -20 dB (0.01) at 100 rad/s.
Req = TuningGoal.MaxLoopGain('X',100,0.01);
viewGoal(Req)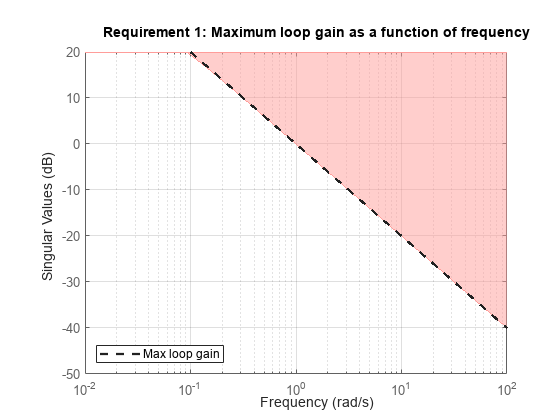
viewGoal confirms that the tuning goal is correctly specified. You can use this tuning goal to tune a control system that has a loop-opening location identified as 'X'. Since loop gain values greater than 1 are ignored, this requirement specifies a rolloff of 20 dB/decade above 1 rad/s, with no restriction on loop gain below that frequency.
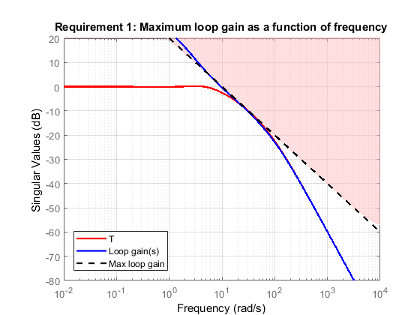
Although the specified gain profile (dashed line) is a pure integrator, for numeric reasons, the gain profile enforced during tuning levels off at very high frequencies, as described in Algorithms. To see the regularized gain profile, expand the axes of the tuning-goal plot.
xlim([10^-2,10^4]) ylim([-80,20])

The shaded region reflects the modified gain profile.
Create requirements that specify a minimum loop gain of 20 dB (100) at 50 rad/s and a maximum loop gain of -20 dB (0.01) at 1000 rad/s on the inner loop of the following control system.

Create the maximum and minimum loop gain requirements.
RMinGain = TuningGoal.MinLoopGain('X2',50,100); RMaxGain = TuningGoal.MaxLoopGain('X2',1000,0.01);
Configure the requirements to apply to the loop gain of the inner loop measured with the outer loop open.
RMinGain.Openings = 'X1'; RMaxGain.Openings = 'X1';
Setting Req.Openings tells the tuning algorithm to enforce the requirements with a loop open at the specified location. With the outer loop open, the requirements apply only to the inner loop.
By default, tuning using TuningGoal.MinLoopGain or TuningGoal.MaxLoopGain imposes a stability requirement as well as the minimum or maximum loop gain. Practically, in some control systems it is not possible to achieve a stable inner loop. In that case, remove the stability requirement for the inner loop by setting the Stabilize property to false.
RMinGain.Stabilize = false; RMaxGain.Stabilize = false;
When you tune using either of these requirements, the tuning algorithm still imposes a stability requirement on the overall tuned control system, but not on the inner loop alone.
Tips
This tuning goal imposes an implicit stability constraint on the closed-loop sensitivity function measured at
Location, evaluated with loops opened at the points identified inOpenings. The dynamics affected by this implicit constraint are the stabilized dynamics for this tuning goal. TheMinDecayandMaxRadiusoptions ofsystuneOptionscontrol the bounds on these implicitly constrained dynamics. If the optimization fails to meet the default bounds, or if the default bounds conflict with other requirements, usesystuneOptionsto change these defaults.
Algorithms
When you tune a control system using a TuningGoal, the software converts
the tuning goal into a normalized scalar value f(x). Here,
x is the vector of free (tunable) parameters in the control system. The
software then adjusts the parameter values to minimize f(x)
or to drive f(x) below 1 if the tuning goal is a hard
constraint.
For TuningGoal.MaxLoopGain, f(x) is
given by:
Here, D is a diagonal scaling (for MIMO loops). T is
the complementary sensitivity function at Location.
WT is a frequency-weighting function derived from the
maximum loop gain profile, MaxGain. The gain of this function roughly matches
1/MaxGain for values ranging from –60 dB to 20 dB. For numerical reasons, the
weighting function levels off outside this range, unless the specified gain profile changes slope
outside this range. This adjustment is called regularization. Because
poles of WT close to s = 0 or
s = Inf might lead to poor numeric conditioning of the
systune optimization problem, it is not recommended to specify gain
profiles with very low-frequency or very high-frequency dynamics.
To obtain WT, use:
WT = getWeight(Req,Ts)
where Req is the tuning goal, and Ts is the sample
time at which you are tuning (Ts = 0 for continuous time). For more
information about regularization and its effects, see Visualize Tuning Goals.
Although T is a closed-loop transfer function, driving f(x) < 1 is equivalent to enforcing an upper bound on the open-loop transfer, L, in a frequency band where the gain of L is less than one. To see why, note that T = L/(I + L). For SISO loops, when |L| << 1, |T| ≈ |L|. Therefore, enforcing the open-loop maximum gain requirement, |L| < 1/|WT|, is roughly equivalent to enforcing |WTT| < 1. For MIMO loops, similar reasoning applies, with ||T|| ≈ σmax(L), where σmax is the largest singular value.
Version History
Introduced in R2014aSee Also
looptune | systune | looptune (for slTuner) (Simulink Control Design) | systune (for slTuner) (Simulink Control Design) | viewGoal | evalGoal | TuningGoal.Gain | TuningGoal.LoopShape | TuningGoal.MinLoopGain | TuningGoal.Margins | slTuner (Simulink Control Design) | sigma