Train Classification Network to Classify Object in 3-D Point Cloud
This example demonstrates the approach outlined in [1] in which point cloud data is preprocessed into a voxelized encoding and then used directly with a simple 3-D convolutional neural network (CNN) architecture to perform object classification. In more recent approaches such as [2], encodings of point cloud data can be more complicated and can be learned encodings that are trained end-to-end along with a network performing a classification/object detection/segmentation task. However, the general pattern of moving from irregular unordered points to a gridded structure that can be fed into CNNs remains similar in all of these approaches.
Import and Analyze Data
In this example, we work with the Sydney Urban Objects Dataset. In this example, use folds 1-3 from the data as the training set and fold 4 as the validation set.
dataPath = downloadSydneyUrbanObjects(tempdir); dsTrain = loadSydneyUrbanObjectsData(dataPath,[1 2 3]); dsVal = loadSydneyUrbanObjectsData(dataPath,4);
Analyze the training set to understand the labels present in the data and the overall distribution of labels.
dsLabels = transform(dsTrain,@(data) data{2});
labels = readall(dsLabels);
figure
histogram(labels)
From the histogram, it is apparent that there is a class imbalance issue in the training data in which certain object classes like Car and Pedestrian are much more common than less frequent classes like Ute.
Data Augmentation
To avoid overfitting and add robustness to a classifier, some amount of randomized data augmentation is generally a good idea when training a network. The functions randomAffine2d and pctransform make it easy to define randomized affine transformations on point cloud data. We additionally add some randomized per-point jitter to each point in every point cloud. The function augmentPointCloudData is included in the supporting functions section below.
dsTrain = transform(dsTrain,@augmentPointCloudData);
Verify that augmentation of point cloud data looks reasonable.
dataOut = preview(dsTrain);
figure
pcshow(dataOut{1});
title(dataOut{2});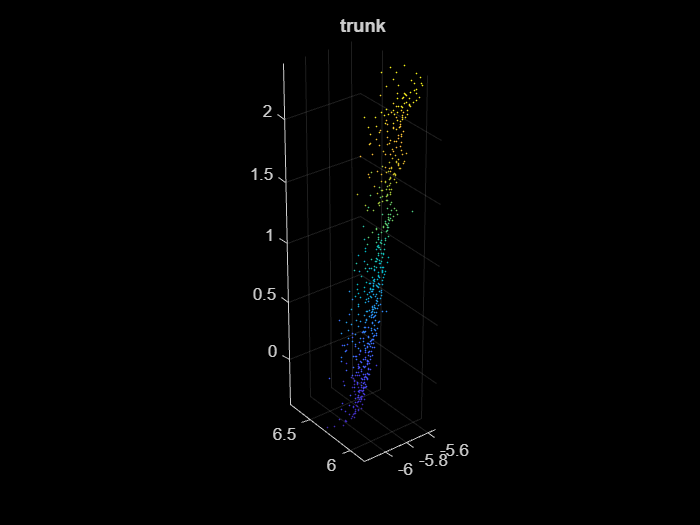
We next add a simple voxelization transform to each input point cloud as discussed in the previous example, to transform our input point cloud into a pseudo-image that can be used with a CNN. Use a simple occupancy grid.
dsTrain = transform(dsTrain,@formOccupancyGrid); dsVal = transform(dsVal,@formOccupancyGrid);
Examine a sample of the final voxelized volume that we will feed into the network to verify that voxelization is working correctly.
data = preview(dsTrain);
figure
p = patch(isosurface(data{1},0.5));
p.FaceColor = "red";
p.EdgeColor = "none";
daspect([1 1 1])
view(45,45)
camlight;
lighting phong
title(data{2});
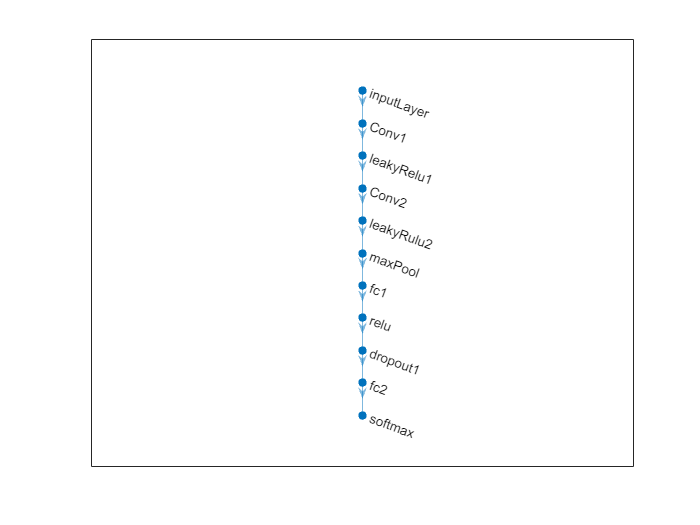
Define Network Architecture
In this example, we use a simple 3-D classification architecture as described in [1].
layers = [image3dInputLayer([32 32 32],Name="inputLayer",Normalization="none"),... convolution3dLayer(5,32,Stride=2,Name="Conv1"),... leakyReluLayer(0.1,Name="leakyRelu1"),... convolution3dLayer(3,32,Stride=1,Name="Conv2"),... leakyReluLayer(0.1,Name="leakyRulu2"),... maxPooling3dLayer(2,Stride=2,Name="maxPool"),... fullyConnectedLayer(128,Name="fc1"),... reluLayer(Name="relu"),... dropoutLayer(0.5,Name="dropout1"),... fullyConnectedLayer(14,Name="fc2"),... softmaxLayer(Name="softmax")]; voxnet = dlnetwork(layers); figure plot(voxnet);
Setup Training Options
Use stochastic gradient descent with momentum with a piecewise adjustment to the learning rate schedule. This example was run on a TitanX GPU. If your GPU has less memory, it may be necessary to reduce the batch size. Though 3-D CNNs have an advantage of conceptual simplicity, they have the drawback of large amounts of memory usage at training time.
miniBatchSize = 32; dsLength = length(dsTrain.UnderlyingDatastore.Files); iterationsPerEpoch = floor(dsLength/miniBatchSize); dropPeriod = floor(8000/iterationsPerEpoch); options = trainingOptions("sgdm",... InitialLearnRate=0.01,... MiniBatchSize=miniBatchSize,... LearnRateSchedule="Piecewise",... LearnRateDropPeriod=dropPeriod,... ValidationData=dsVal, ... MaxEpochs=60,... DispatchInBackground=false,... Shuffle="never");
Train Network
Train the neural network using the trainnet (Deep Learning Toolbox) function. For classification, use cross-entropy loss.
voxnet = trainnet(dsTrain,voxnet,"crossentropy",options); Iteration Epoch TimeElapsed LearnRate TrainingLoss ValidationLoss
_________ _____ ___________ _________ ____________ ______________
0 0 00:00:07 0.01 2.649
1 1 00:00:08 0.01 2.6395
50 4 00:00:30 0.01 2.0839 2.3076
100 8 00:00:53 0.01 2.3592 2.2487
150 12 00:01:16 0.01 2.2527 1.9915
200 16 00:01:38 0.01 2.0546 1.8198
250 20 00:02:01 0.01 1.6182 1.5325
300 24 00:02:23 0.01 1.7817 1.4501
350 27 00:02:45 0.01 1.5115 1.2817
400 31 00:03:07 0.01 1.2351 1.2655
450 35 00:03:30 0.01 1.5587 1.2746
500 39 00:03:52 0.01 1.3871 1.3286
550 43 00:04:17 0.01 1.4678 1.1589
600 47 00:04:39 0.01 1.4869 1.175
650 50 00:05:01 0.01 0.92234 1.1875
700 54 00:05:23 0.01 0.90772 1.1278
750 58 00:05:45 0.01 1.1843 1.1523
780 60 00:05:58 0.01 0.90802 1.0837
Training stopped: Max epochs completed
Evaluate Network
Following the structure of [1], this example only forms a training and validation set from Sydney Urban Objects. Evaluate the performance of the trained network using the validation, since it was not used to train the network.
valLabelSet = transform(dsVal,@(data) data{2});
valLabels = readall(valLabelSet);
outputScores = minibatchpredict(voxnet,dsVal);
outputLabels = scores2label(outputScores,categories(labels));
accuracy = nnz(outputLabels == valLabels) / numel(outputLabels);
disp(accuracy)0.6903
View the confusion matrix to study the accuracy across the various label categories.
confusionchart(valLabels,outputLabels)
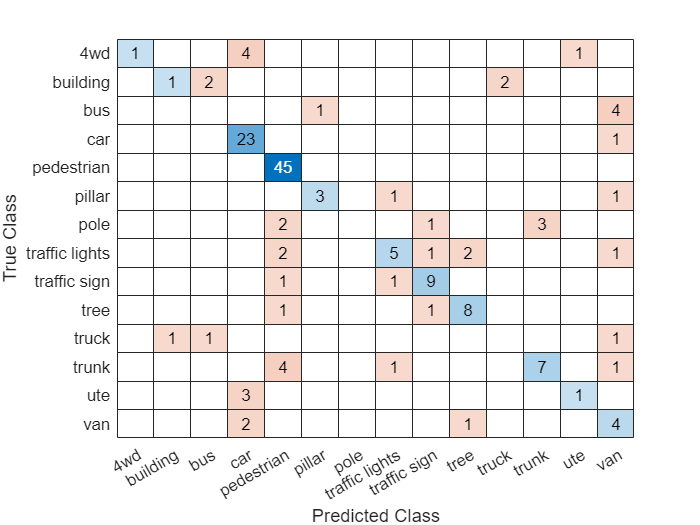
The label imbalance noted in the training set is an issue in the classification accuracy. The confusion chart illustrates higher precision and recall for pedestrian, the most common class, than for less common classes like van. Since the purpose of this example is to demonstrate a basic classification network training approach with point cloud data, possible next steps that could be taken to improve classification performance such as resampling the training set or achieve better label balance or using a loss function more robust to label imbalance (e.g. weighted cross-entropy) will not be explored.
Supporting Functions
function datasetPath = downloadSydneyUrbanObjects(dataLoc) if nargin == 0 dataLoc = pwd(); end dataLoc = string(dataLoc); url = "http://www.acfr.usyd.edu.au/papers/data/"; name = "sydney-urban-objects-dataset.tar.gz"; if ~exist(fullfile(dataLoc,"sydney-urban-objects-dataset"),"dir") disp("Downloading Sydney Urban Objects Dataset..."); untar(url+name,dataLoc); end datasetPath = fullfile(dataLoc,"sydney-urban-objects-dataset"); end
function ds = loadSydneyUrbanObjectsData(datapath,folds) % loadSydneyUrbanObjectsData Datastore with point clouds and % associated categorical labels for Sydney Urban Objects dataset. % % ds = loadSydneyUrbanObjectsData(datapath) constructs a datastore that % represents point clouds and associated categories for the Sydney Urban % Objects dataset. The input, datapath, is a string or char array which % represents the path to the root directory of the Sydney Urban Objects % Dataset. % % ds = loadSydneyUrbanObjectsData(___,folds) optionally allows % specification of desired folds that you wish to be included in the % output ds. For example, [1 2 4] specifies that you want the first, % second, and fourth folds of the Dataset. Default: [1 2 3 4]. if nargin < 2 folds = 1:4; end datapath = string(datapath); path = fullfile(datapath,"objects",filesep); % For now, include all folds in Datastore foldNames{1} = importdata(fullfile(datapath,'folds','fold0.txt')); foldNames{2} = importdata(fullfile(datapath,'folds','fold1.txt')); foldNames{3} = importdata(fullfile(datapath,'folds','fold2.txt')); foldNames{4} = importdata(fullfile(datapath,'folds','fold3.txt')); names = foldNames(folds); names = vertcat(names{:}); fullFilenames = append(path,names); ds = fileDatastore(fullFilenames,ReadFcn=@extractTrainingData,FileExtensions=".bin"); % Shuffle ds.Files = ds.Files(randperm(length(ds.Files))); end
function dataOut = extractTrainingData(fname) [pointData,intensity] = readbin(fname); [~,name] = fileparts(fname); name = string(name); name = extractBefore(name,'.'); name = replace(name,'_',' '); labelNames = ["4wd","building","bus","car","pedestrian","pillar",... "pole","traffic lights","traffic sign","tree","truck","trunk","ute","van"]; label = categorical(name,labelNames); dataOut = {pointCloud(pointData,'Intensity',intensity),label}; end
function [pointData,intensity] = readbin(fname) % readbin Read point and intensity data from Sydney Urban Object binary % files. % names = ['t','intensity','id',... % 'x','y','z',... % 'azimuth','range','pid'] % % formats = ['int64', 'uint8', 'uint8',... % 'float32', 'float32', 'float32',... % 'float32', 'float32', 'int32'] fid = fopen(fname, 'r'); c = onCleanup(@() fclose(fid)); fseek(fid,10,-1); % Move to the first X point location 10 bytes from beginning X = fread(fid,inf,'single',30); fseek(fid,14,-1); Y = fread(fid,inf,'single',30); fseek(fid,18,-1); Z = fread(fid,inf,'single',30); fseek(fid,8,-1); intensity = fread(fid,inf,'uint8',33); pointData = [X,Y,Z]; end
function dataOut = formOccupancyGrid(data) grid = pcbin(data{1},[32 32 32]); occupancyGrid = zeros(size(grid),'single'); for ii = 1:numel(grid) occupancyGrid(ii) = ~isempty(grid{ii}); end label = data{2}; dataOut = {occupancyGrid,label}; end
function dataOut = augmentPointCloudData(data) ptCloud = data{1}; label = data{2}; % Apply randomized rotation about Z axis. tform = randomAffine3d(Rotation=@() deal([0 0 1],360*rand),Scale=[0.98,1.02], ... XReflection=true,YReflection=true); % Randomized rotation about z axis ptCloud = pctransform(ptCloud,tform); % Apply jitter to each point in point cloud amountOfJitter = 0.01; numPoints = size(ptCloud.Location,1); D = zeros(size(ptCloud.Location),'like',ptCloud.Location); D(:,1) = diff(ptCloud.XLimits)*rand(numPoints,1); D(:,2) = diff(ptCloud.YLimits)*rand(numPoints,1); D(:,3) = diff(ptCloud.ZLimits)*rand(numPoints,1); D = amountOfJitter.*D; ptCloud = pctransform(ptCloud,D); dataOut = {ptCloud,label}; end
References
1) Voxnet: A 3d convolutional neural network for real-time object recognition, Daniel Maturana, Sebastian Scherer, 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
2) PointPillars: Fast Encoders for Object Detection from Point Clouds, Alex H. Lang, Sourabh Vora, et al, CVPR 2019.
3) Sydney Urban Objects Dataset, Alastair Quadros, James Underwood, Bertrand Douillard, Sydney Urban Objects.