Build S-Functions Automatically Using S-Function Builder
The S-Function Builder block is a Simulink® block that integrates C/C++ code to build an S-function from specifications and C/C++ code that you supply. The S-Function Builder block also serves as a wrapper for the generated S-function in models that use the S-function.
Create an S-Function Builder Block and Specify Settings
To add the S-Function Builder block to a model, click the Simulink canvas and type S-Function Builder or drag a
S-Function Builder block from Simulink Library > User-Defined. To open the S-Function Builder editor, double-click the
S-Function Builder block icon.
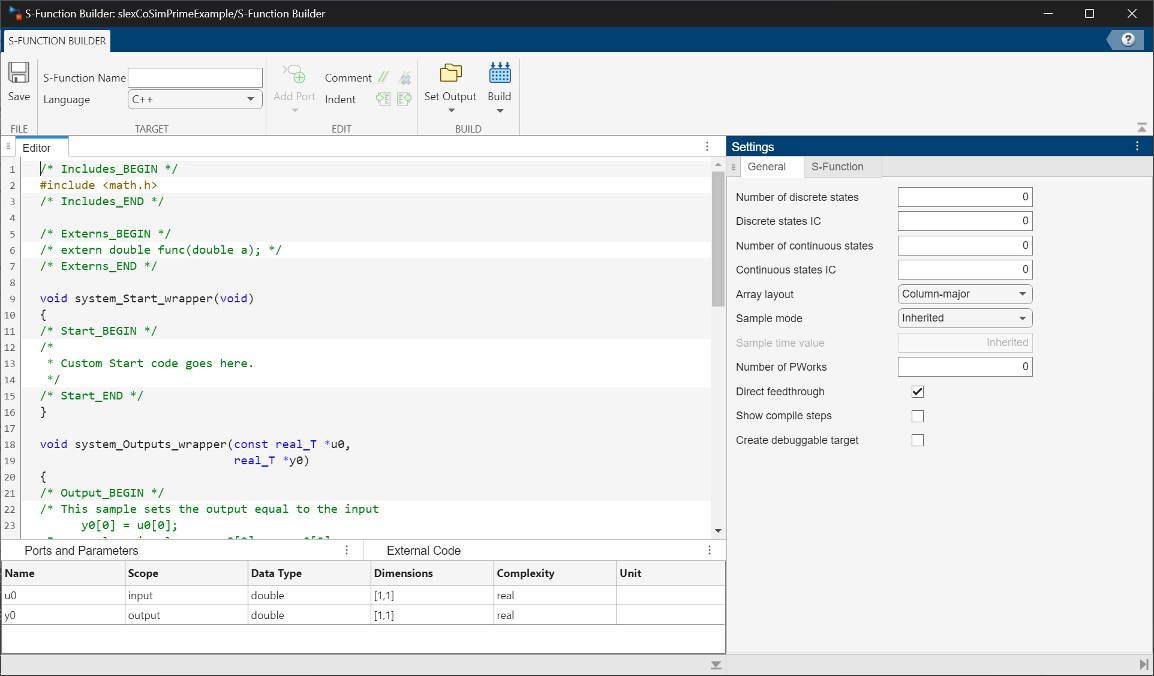
S-Function Builder editor is composed of five user interface components:
S-Function Builder toolstrip
General tab of the Settings pane
S-Function tab of the Settings pane
Ports and Parameters Table
External Code table
To start constructing your S-function, specify a name for the S-function. When you name the S-function, all functions in the S-Function Builder editor change, and the S-function name becomes a prefix to all wrapper functions.
Use the S-Function Builder toolstrip to specify a target language for the S-function:
C — Generate C S-functions.
C++ — Generate C++ S-functions.
Inherit from model — Inherit the language from the Language (Simulink Coder) configuration parameter for the model.
Use the General tab of the Settings pane on
the right of the S-Function Builder editor to specify the basic features of the block, such
as initial conditions, and number of states. The S-Function Builder block
uses the settings to generate the mdlInitializeSizes callback method. The
Simulink engine invokes this method during the model initialization phase of the
simulation to obtain basic information about the S-function.
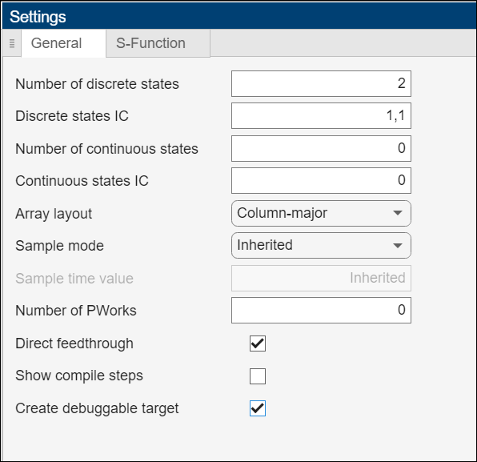
Set Number of States and Initial Conditions
Using the Settings pane, you can specify the number of discrete and continuous states and their initial conditions.
You can enter the values of initial conditions as a comma-separated list, (for
example, 1,1,1) or as a vector (for example, [1 1
1]). The number of initial conditions must be equal to the number of states
indicated.
Set Array Layout
Set the array layout of your C/C++ code. You can select one of the options listed in the table.
| Option | Array Layout of C/C++ Function | Action |
|---|---|---|
Column-major | Column-major | The S-Function Builder block adds the SimStruct function
|
Row-major | Row-major | The S-Function Builder block adds the SimStruct function
During simulation, if your C/C++ code involves matrices or multidimensional inputs, outputs, or parameters, transposes are added to these S-function callback methods:
Simulink also applies these transposes when running accelerator and rapid accelerator simulations. The S-function is not inlined by using TLC. Instead, the MEX S-function with transposes is compiled directly. |
Any | C/C++ function is not affected by array layout | The S-Function Builder block adds the SimStruct function
|
Select Sample Mode
Select the sample mode of your S-function. The sample mode determines the length of the interval between the times when the S-function updates its output. You can select one of these options:
Inherited— The S-function inherits the sample mode from the block connected to the input port. When inherited sample mode is selected, the Sample time value field of the Settings table is inactive.Continuous— The block updates output values at each simulation step. When continuous sample time is selected, the Sample time value field of the Settings table is inactive.Discrete— The S-function updates output values at the rate specified in the Sample time value field of the Settings table.
Set the Number of PWorks
Set PWorks, the number of data pointers used by the S-function.
PWorks points to the memory over the lifecycle of the block. If you
enter any other value than 0 for Number of PWorks,
it adds a pointer, void **PW, to all functions in the S-Function
Builder. For example, you can declare and initialize a pointer to a file or memory at the
Start_wrapper, access it in Outputs_wrapper,
Update_wrapper, and Derivatives_wrapper functions,
and deallocate it at the Terminate_wrapper function. The code written
in these functions is called by the mdlStart,
mdlOutputs, mdlUpdate,
mdlDerivatives, and mdlTerminate methods. See the
examples Moving Average
with Start and Terminate and Permutation using Cpp
Classes in S-Function
Demos.
Note
To use PWorks and model operating point in the same S-function,
specify the operating point compliance as
USE_CUSTOM_OPERATING_POINT.
When you use PWorks without explicitly specifying the operating
point compliance, the compliance becomes DISALLOW_OPERATING_POINT
after compilation. For more information, see ssSetOperatingPointCompliance.
Direct Feedthrough
If the values from the current time step of the S-function inputs are used to compute the outputs, then on the Settings table, select Direct Feedthrough. The Simulink engine uses this information to detect algebraic loops created by directly or indirectly connecting the S-function output to the S-function input.
Show Compile Steps
Specify option to log each build step in the Build Log field.
Create a debuggable MEX-file
Specify option to include debugging information in the generated MEX file.
Use the S-Function tab of the Settings pane on the right of the S-Function Builder editor to specify the S-Function specific options for the block, such as enabling access to simstruct, and generating wrapper TLC.
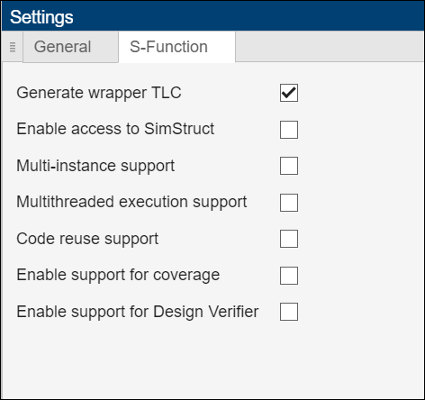
Generate wrapper TLC
Select this option to generate a TLC file. You need to generate a TLC file if you are running your model in rapid accelerator mode or generating Simulink Coder™ code from your model. Also, while it is not necessary for accelerator mode simulations, the TLC file generates code for the S-function and thus makes your model run faster in accelerator mode.
Enable Access to SimStruct
Make the SimStruct (S) accessible to the wrapper
functions that the S-Function Builder is using. This selection enables you to use the
SimStruct macros and functions with your code in the
Outputs_wrapper, Derivatives_wrapper, and the
Update_wrapper functions. When you turn this setting on,
SimStruct *S is added to the list of parameters.
For example, with this option enabled, you can use macros such as ssGetT in code that computes the S-function outputs:
double t = ssGetT(S);
if(t < 2)
{
y0[0] = u0[0];
} else
{
y0[0]= 0.0;
}
|
Multi-instance Support
To declare that multiple execution instances of the generated S-function can operate with each other and that the function is configured to be used within the For Each Subsystem, on the Settings table, select Multi-instance Support. For more information on configuring an S-Function for Multi-instance support, see S-Function Support under For Each Subsystem.
Multithreaded Execution Support
To declare that the generated S-function can run multithreaded, on the Settings table, select Multithreaded Execution Support.
Code Reuse Support
To declare that the generated S-function meets the requirements for subsystem code reuse, on the Settings table, select Code Reuse Support. For more information on configuring an S-function for code reuse, see S-Functions for Code Reuse (Simulink Coder).
Enable support for coverage
Enable option to specify that an S-Function is compatible with model coverage. For more information, see Coverage for Custom C/C++ Code in Simulink Models (Simulink Coverage) in the Simulink Coverage™ documentation.
Enable support for design verifier
Generate an S-function for use with the Simulink Design Verifier™. For more information, see Support Limitations for S-Functions and C/C++ Code (Simulink Design Verifier)
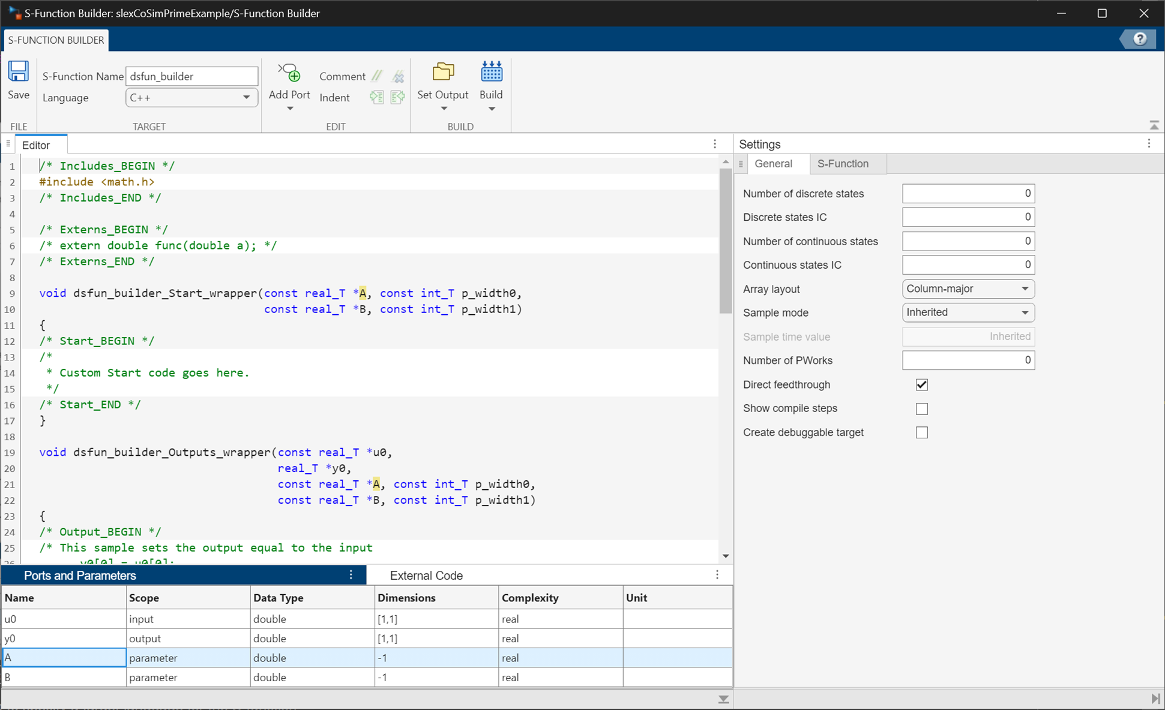
Specify Ports and Parameters for the S-Function
Use the Ports and Parameters table on the bottom of the editor to specify input and output ports and parameters for the S-function. To add a port or parameter:
Select the Ports and Parameters table, and from the S-Function Builder toolstrip, select your choice under
Insert Port.Select the Ports and Parameters table and right-click one of the headers on the table.
To delete a port or parameter in the table, select the port or parameter you would like to delete, right-click to open the menu and click Delete.
The order of the ports and parameters in the table is the order of ports and parameters
on the block. For example, the first input port on the table is the input port with the
index 0, and the first parameter is the parameter with index
0.
You can define these settings in the Ports and Parameters table.
Name — Name of port or parameter. To change the name of a port or parameter, double-click the name.
Scope — Scope of port or parameter. The variable could be an input or output port or a parameter. Click the scope value to change scope of the port or parameter.
Data type — Data type of port or parameter. You can specify Simulink built-in numeric data types for ports and parameters. You can also specify
fixdtdata types and bus types for ports. Theint64anduint64data types are not supported for parameters.Dimensions — Dimension of port or parameter. To inherit dimensions for ports, specify the dimension as
[-1,1]. Inherited dimension is supported only for the first input and output ports. For parameters, the dimension is set to-1and is inherited from the block parameters on the block interface.To specify a 1-D dimension, only enter the number of rows for the dimension, for example,
[2]. To enter an N-D dimension, enter the dimension as a vector with elements specifying size of each dimension. Dynamically sized ports are not supported for the third or higher dimensionsComplexity — Specify the complexity of the port or parameter as real or complex.
Unit — Specify the unit for the port or parameter. For example,
m/s,kgetc. For more information about Simulink units, see Unit Specification in Simulink Models.
Use the Custom Code Table to Specify External Code and Paths
The Custom Code table allows you to specify the location of external code files referenced by custom code that you enter in the other wrapper methods of the S-Function Builder editor.
To enter a new path or an entry, select the Custom Code table and
select one of the options under Insert Paths on the S-Function
Builder toolstrip. Once you select path or entry, you can change your selection by clicking
the tag on the table. You can enter paths or entries to the external libraries, object codes
and source files referenced by custom code on the S-Function Builder editor.
| Tag to choose | Purpose |
|---|---|
Library Directory | Specify object and library paths. |
Include Directory | Specify the include search paths for header files and source files. |
Source Directory | Specify search paths for object files and source files. |
Environment Variable | Specify environment variables. |
Library/Source File | Specify the object, source, and library file names. You can also enter
preprocessor directives in this field, for example, |
Enclose the names of the header files on the top of the code editor. If you are using
custom header files that are not on the same path, include the directory with the
INC_PATH tag. Similarly, use the top of the editor to declare external
functions that are not declared in the header files. Include each declaration on a separate
line.
You can enter paths or entries to the external libraries, object codes, and source files referenced by custom code on the S-Function Builder editor.
For example, consider an S-Function Builder project in C:\Program
Files\MATLAB\work. The table shows on how to link to external
files:
| File Locations | Entries to the Libraries Table |
|---|---|
|
|
C:\Program
Files\MATLAB\work\customobjs\userfunctions.obj |
|
|
|
|
Tip You can use the
setenv("PROJROOT", "C:\Program Files\MATLAB\work") |
You can use LIB_PATH to specify both object and library file paths.
You can include the library name in the LIB_PATH declaration. However,
you must place the object file name on a separate line. The tag
$MATLABROOT indicates a path relative to the MATLAB® installation. List multiple LIB_PATH entries on separate
lines. The paths are searched in the order you specify.
Each directive must be listed on a separate line.
Note
Do not put quotation marks around the library path, even if the path name has spaces in it. If you add quotation marks, the compiler will not find the library.
You can specify platform-specific code files in the custom code table. Use the
Platform View option of the Custom Code
table to specify the intended platform for each of the listed files. You can specify the
Platform for a file as Linux,
Windows, macOS, or All
Platforms. Each table entry is by default set as All
Platforms.
For example, consider a project with the following structure.
netapp/
├─ include/ # Platform-agnostic headers
│ ├─ application.hpp
│ └─ networking.hpp
│
├─ src/ # Sources compiled by S-Function Builder
│ ├─ application.cpp # Cross-platform logic
│ ├─ networking_win64.cpp # Windows-specific networking implementation
│ └─ networking_linux64.cpp # Linux-specific networking implementation
│
└─ lib/ # Prebuilt runtime/link-time libraries
├─ win64/
│ ├─ utils.dll # Runtime library for Windows
│
└─ linux64/
├─ libutils.so # Runtime library for Linux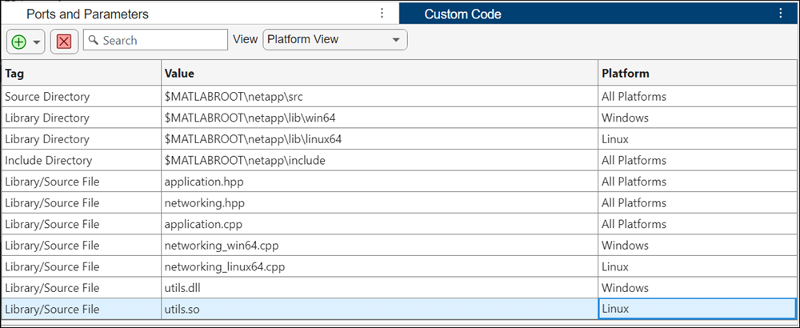
Develop the S-Function
The S-Function Builder block uses wrapper methods to specify the S-function code and properties that generate the corresponding S-function. Use the appropriate wrapper methods to construct the S-function body. Click Apply on the toolstrip to generate the S-function code.
This table provides a summary of S-Function Builder methods:
| S-Function Method | Wrapper Method | Purpose |
|---|---|---|
| Start and Terminate |
| Allocate and deallocate memory at the start and the end of simulation.
Allocated memory is referenced using PWorks for use throughout
the S-Function. |
| Outputs |
| Enter the code that computes the outputs of the S-function at each simulation time step. |
| Update |
| Enter the code that computes the value of discrete states at the next time step using the values at the current time step. This method only exists when you specify Number of Discrete States on the Settings table. |
| Derivatives |
| Enter the code to compute state derivatives. This method only exists when you specify Number of Continuous States on the Settings table. |
Compute Outputs Using Outputs Method
In the S-Function Builder editor, use the Outputs_wrapper method to
enter the code that computes the outputs of the S-function at each simulation time step.
When generating the S-function code, the S-Function Builder block generates
a wrapper method using the name of your model and a wrapper function in the form of
<system_name>_<function_name>_wrapper. For example, if your
model is named dsfunc_builder, the output method appears as
dsfunc_builder_Output_wrapper in the S-Function Builder editor. If
you do not have a name for your S-Function Builder block yet, it appears as
system_Output_wrapper.
See the following code for an example of the Outputs method:
void sfun_Outputs_wrapper(const real_T *u,
real_T *y,
const real_T *xD, /* optional */
const real_T *xC, /* optional */
const real_T *param0, /* optional */
int_T p_width0 /* optional */
real_T *param1 /* optional */
int_t p_width1 /* optional */
int_T y_width, /* optional */
int_T u_width) /* optional */
{
/* Your code inserted here */
}
|
where sfun is the name of the S-function. The S-Function
Builder block inserts a call to this wrapper function in the mdlOutputs callback method that it generates for your S-function. The
Simulink engine invokes the mdlOutputs method at each simulation
or sample time step to compute the S-function output. The mdlOutputs
method in turn invokes the wrapper function containing your output code. Your output code
then computes and returns the S-function output.
The mdlOutputs method passes some or all of the following arguments
to the outputs wrapper function.
| Argument | Description |
|---|---|
u0, u1, ... uN | Pointers to arrays that contain the inputs to the S-function, where
N is the number of input ports specified on the
Input scope found on the Ports and
Parameters table. The names of the arguments that appear in the
outputs wrapper function are the same as the names found on the
Input scope of the Ports and
Parameters table. The width of each array is the same as the input
width specified for each input on the Dimensions pane. If the
input is a matrix, the width equals the product of the dimensions of the arrays.
If you specify -1 as an input width, the width of the array is specified by the
wrapper function's u_width argument. |
y0, y1, ... yN | Pointer to arrays that contain the outputs of the S-function, where
N is the number of output ports specified on the
Scope pane on the Ports and Parameters
table. The names of the arguments that appear in the outputs wrapper function are
the same as the names found on the Output scope of
Ports and Parameters table. The width of each array is the
same as the output width specified for each output on the
Dimensions pane. If an output is a matrix, the width equals
the product of the dimensions of the arrays. If you specified -1 as the output
width, the width of the array is specified by the wrapper function's
y_width argument. Use this array to pass the outputs that
your code computes back to the Simulink engine. |
xD | Pointer to an array that contains the discrete states of the S-function. This argument appears only if you specify discrete states on the Number of discrete states in the Settings menu. At the first simulation time step, the discrete states have the initial values that you specify on the Discrete states IC. At subsequent sample-time steps, the states are obtained from the values that the S-function computes at the preceding time step. |
xC | Pointer to an array that contains the continuous states of the S-function. This argument appears only if you specify number of continuous states on the Number of continuous states row of the Settings menu. At the first simulation time step, the continuous states have the initial values that you specify on the Continuous states IC row. At subsequent time steps, the states are obtained by numerically integrating the derivatives of the states at the preceding time step. |
param0, p_width0,
param1, p_width1, ...
paramN, p_widthN | param0, param1,
...paramN are pointers to arrays that contain the S-function
parameters, where N is the number of parameters specify on the
Ports and Parameters table. p_width0,
p_width1, ...p_widthN are the widths of
the parameter arrays. If a parameter is a matrix, the width equals the product of
the dimensions of the arrays. For example, the width of a 3-by-2 matrix parameter
is 6. |
y_width | Width of the array that contains the S-function outputs. This argument
appears in the generated code only if you specify -1 as the
width of the S-function output. If the output is a matrix,
y_width is the product of the dimensions of the
matrix. |
u_width | Width of the array that contains the S-function inputs. This argument appears
in the generated code only if you specify -1 as the width of
the S-function input. If the input is a matrix, u_width is the
product of the dimensions of the matrix. |
These arguments permit you to compute the output of the block as a function of its inputs and, optionally, its states and parameters. The code that you enter in this field can invoke external functions declared in the header files or external declarations on the Libraries table, which allows you to use existing code to compute the outputs of the S-function.
Update Discrete States Using Update Method
Use the Update_wrapper function to enter code that computes the
values of the discrete states at the next time step according to the values at the current
time step. See the following code:
void sfun_Update_wrapper(const real_T *u,
const real_T *y,
real_T *xD,
const real_T *param0, /* optional */
int_T p_width0, /* optional */
real_T *param1,/* optional */
int_T p_width1, /* optional */
int_T y_width, /* optional */
int_T u_width) /* optional */
{
/* Your code inserted here. */
}
where sfun is the name of the S-function. The S-Function
Builder block inserts a call to this wrapper function in the mdlUpdate callback method that it generates for the S-function. The
Simulink engine calls the mdlUpdate method at the end of each time
step to obtain the values of the discrete states at the next time step (see Simulink Engine Interaction with C S-Functions). At the next
time step, the engine passes the updated states back to the mdlOutputs
method.
The mdlUpdate callback method generated for the S-function passes
the following arguments to the Update_wrapper function:
uyxDparam0,p_width0,param1,p_width1, ...paramN,p_widthNy_widthu_width
See Compute Outputs Using Outputs Method for the meanings and
usage of these arguments. Your code should use the discrete states variable,
xD, to return the values of the discrete states that it computes. The
arguments allow your code to compute the discrete states as functions of the S-function
inputs, outputs, and, optionally, parameters. Your code can invoke external functions
declared in the code editor.
Compute Continuous States Using Derivatives Method
If the S-function has continuous states, use the
Derivatives_wrapper function to enter the code required to compute
the state derivatives. Enter code for the mdlDerivatives function to
compute the derivatives of the continuous states editor under this field. An example
declaration of the function may look like the following:
void system_Derivatives_wrapper(const real_T *u,
const real_T *y,
real_T *dx,
real_T *xC,
const real_T *param0, /* optional */
int_T p_width0, /* optional */
real_T *param1,/* optional */
int_T p_width1, /* optional */
int_T y_width, /* optional */
int_T u_width) /* optional */
{
/* Your code inserted here. */
}
|
where system is the name of the S-function.
The S-Function Builder block inserts a call to this wrapper function in
the mdlDerivatives method that it generates
for the S-function. The Simulink engine calls the mdlDerivatives method at the end of each
time step to obtain the derivatives of the continuous states (see Simulink Engine Interaction with C S-Functions). The Simulink solver numerically integrates the derivatives to determine the continuous
states at the next time step. At the next time step, the engine passes the updated states
back to the mdlOutputs method. For more information on how
Simulink engine interacts with S-functions, see Simulink Engine Interaction with C S-Functions.
The mdlDerivatives method generated for the S-function passes the
following arguments to the derivatives wrapper function:
uydxxCparam0,p_width0,param1,p_width1, ...paramN,p_widthNy_widthu_width
The dx argument is a pointer to an array whose width is the same as
the number of continuous derivatives specified on the Settings pane.
Your code should use this array to return the values of the derivatives that it computes.
See the explanation under Compute Outputs Using Outputs Method method for the
meanings and usage of the other arguments. The arguments allow your code to compute
derivatives as a function of the S-function inputs, outputs, and, optionally, parameters.
Your code can invoke external functions declared in the code editor.
Allocate and Deallocate Memory Using Start and Terminate Methods
Use the Start_wrapper method to write code to allocate memory at
the start of simulation. The allocated is referenced by Pworks for use
throughout the S-function. Similarly, use the Terminate_wrapper method
to write code to free up the memory allocated at the Start_wrapper
method. Memory referenced by PWorks can also be seen by
Terminate, and should be deallocated here.
See the Set the Number of PWorks to learn more about
PWorks.
Set Output Path and Build the S-Function
After entering the code in the S-Function Builder editor, set the desired output path. Specify the options under Build menu to build your S-function.
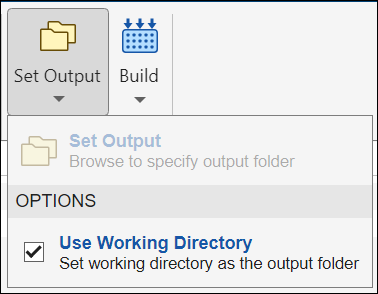
In the Set Output pane, select the Set Output option to specify the directory the generated S-function and related artifacts are saved. Enable the Use Working Directory option to specify the current working directory as the place to save the generated S-function files and artifacts.
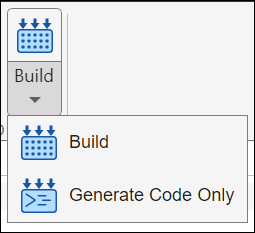
The build menu contains the following two selections:
When you make your selection, click Build to build your S-function and build a MEX file. To exclude building of a MEX file from the generated source code, select Generate Code Only.
See Also
Blocks
Functions
Simulink.SFunctionBuilder.add|Simulink.SFunctionBuilder.delete|Simulink.SFunctionBuilder.update|Simulink.SFunctionBuilder.list|Simulink.SFunctionBuilder.build|Simulink.SFunctionBuilder.generateFMU