stmcb
Compute linear model using Steiglitz-McBride iteration
Syntax
Description
Examples
Approximate the impulse response of an IIR filter with a system of a lower order.
Specify a 6th-order Butterworth filter with normalized 3 dB frequency of rad/sample.
d = designfilt("lowpassiir",FilterOrder=6, ... HalfPowerFrequency=0.2,DesignMethod="butter");
Use the Steiglitz-McBride iteration to approximate the filter with a 4th-order system.
h = impz(d); [bb,aa] = stmcb(h,4,4);
Plot the frequency responses of the two systems.
freqz(d)
legend("Butterworth")
freqz(bb,aa)
legend("Steiglitz-McBride")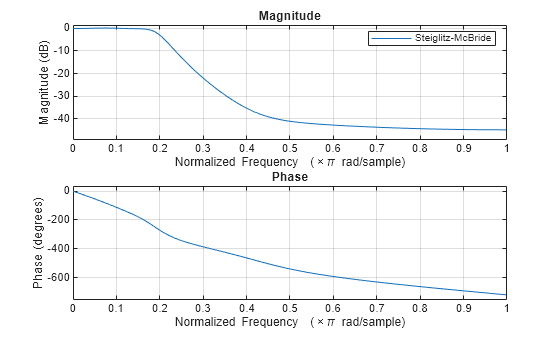
Input Arguments
Output Arguments
Algorithms
The stmcb function attempts to minimize the squared error between the
impulse response h of
b(z)/a(z) and
the input signal x.
The function iterates using two steps:
The function repeats this process niter times. The function does not
check to see if the b and a coefficients have
converged in fewer than niter iterations.
References
[1] Steiglitz, K., and L. McBride. “A Technique for the Identification of Linear Systems.” IEEE® Transactions on Automatic Control 10, no. 4 (October 1965): 461–64. https://doi.org/10.1109/TAC.1965.1098181.
[2] Ljung, Lennart. System Identification: Theory for the User. 2nd ed. Prentice Hall Information and System Sciences Series. Upper Saddle River, NJ: Prentice Hall PTR, 1999.