parabolic
(Not recommended) Solve parabolic PDE problem
parabolic is not recommended. Use solvepde instead.
Syntax
Description
Parabolic equation solver
Solves PDE problems of the type
on a 2-D or 3-D region Ω, or the system PDE problem
The variables c, a, f, and d can depend on position, time, and the solution u and its gradient.
u = parabolic(u0,tlist,model,c,a,f,d)
on a 2-D or 3-D region Ω, or the system PDE problem
with geometry, mesh, and boundary conditions specified in model, and
with initial value u0. The variables c,
a, f, and d in the equation
correspond to the function coefficients c, a,
f, and d respectively.
u = parabolic(___,'Stats','off')
Examples
Parabolic Equation
Solve the parabolic equation
on the square domain specified by squareg.
Create a PDE model and import the geometry.
model = createpde; geometryFromEdges(model,@squareg); pdegplot(model,'EdgeLabels','on') ylim([-1.1,1.1]) axis equal
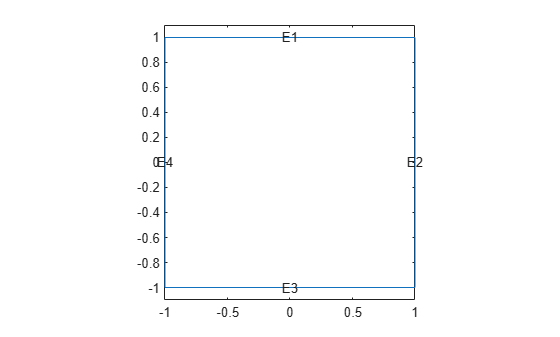
Set Dirichlet boundary conditions on all edges.
applyBoundaryCondition(model,'dirichlet',... 'Edge',1:model.Geometry.NumEdges, ... 'u',0);
Generate a relatively fine mesh.
generateMesh(model,'Hmax',0.02,'GeometricOrder','linear');
Set the initial condition to have on the disk and elsewhere.
p = model.Mesh.Nodes; u0 = zeros(size(p,2),1); ix = find(sqrt(p(1,:).^2 + p(2,:).^2) <= 0.4); u0(ix) = ones(size(ix));
Set solution times to be from 0 to 0.1 with step size 0.005.
tlist = linspace(0,0.1,21);
Create the PDE coefficients.
c = 1; a = 0; f = 0; d = 1;
Solve the PDE.
u = parabolic(u0,tlist,model,c,a,f,d);
134 successful steps 0 failed attempts 270 function evaluations 1 partial derivatives 26 LU decompositions 269 solutions of linear systems
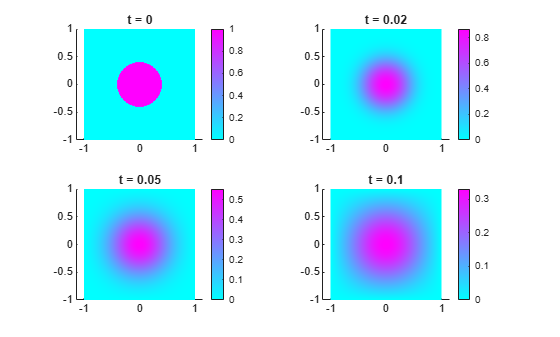
Plot the initial condition, the solution at the final time, and two intermediate solutions.
figure subplot(2,2,1) pdeplot(model,'XYData',u(:,1)); axis equal title('t = 0') subplot(2,2,2) pdeplot(model,'XYData',u(:,5)) axis equal title('t = 0.02') subplot(2,2,3) pdeplot(model,'XYData',u(:,11)) axis equal title('t = 0.05') subplot(2,2,4) pdeplot(model,'XYData',u(:,end)) axis equal title('t = 0.1')
Parabolic Equation Using Legacy Syntax
Solve the parabolic equation
on the square domain specified by squareg, using a geometry function to specify the geometry, a boundary function to specify the boundary conditions, and using initmesh to create the finite element mesh.
Specify the geometry as @squareg and plot the geometry.
g = @squareg; pdegplot(g,'EdgeLabels','on') ylim([-1.1,1.1]) axis equal
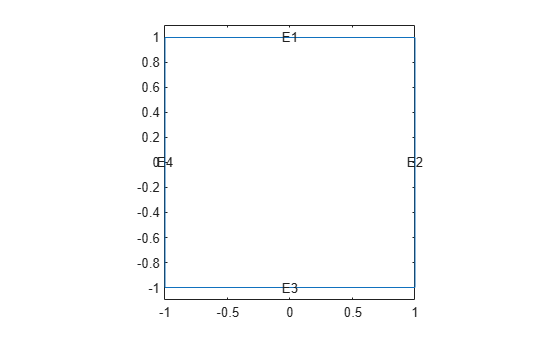
Set Dirichlet boundary conditions on all edges. The squareb1 function specifies these boundary conditions.
b = @squareb1;
Generate a relatively fine mesh.
[p,e,t] = initmesh(g,'Hmax',0.02);Set the initial condition to have on the disk and elsewhere.
u0 = zeros(size(p,2),1); ix = find(sqrt(p(1,:).^2 + p(2,:).^2) <= 0.4); u0(ix) = ones(size(ix));
Set solution times to be from 0 to 0.1 with step size 0.005.
tlist = linspace(0,0.1,21);
Create the PDE coefficients.
c = 1; a = 0; f = 0; d = 1;
Solve the PDE.
u = parabolic(u0,tlist,b,p,e,t,c,a,f,d);
147 successful steps 0 failed attempts 296 function evaluations 1 partial derivatives 28 LU decompositions 295 solutions of linear systems
Plot the initial condition, the solution at the final time, and two intermediate solutions.
figure subplot(2,2,1) pdeplot(p,e,t,'XYData',u(:,1)); axis equal title('t = 0') subplot(2,2,2) pdeplot(p,e,t,'XYData',u(:,5)) axis equal title('t = 0.02') subplot(2,2,3) pdeplot(p,e,t,'XYData',u(:,11)) axis equal title('t = 0.05') subplot(2,2,4) pdeplot(p,e,t,'XYData',u(:,end)) axis equal title('t = 0.1')

Parabolic Problem Using Matrix Coefficients
Create finite element matrices that encode a parabolic problem, and solve the problem.
The problem is the evolution of temperature in a conducting block. The block is a rectangular slab.
model = createpde(1); importGeometry(model,'Block.stl'); handl = pdegplot(model,'FaceLabels','on'); view(-42,24) handl(1).FaceAlpha = 0.5;
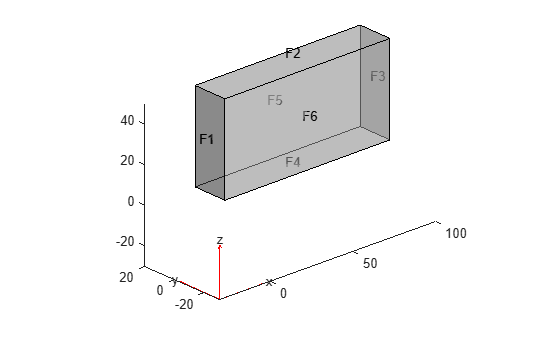
Faces 1, 4, and 6 of the slab are kept at 0 degrees. The other faces are insulated. Include the boundary condition on faces 1, 4, and 6. You do not need to include the boundary condition on the other faces because the default condition is insulated.
applyBoundaryCondition(model,'dirichlet','Face',[1,4,6],'u',0);
The initial temperature distribution in the block has the form
generateMesh(model); p = model.Mesh.Nodes; x = p(1,:); y = p(2,:); z = p(3,:); u0 = x.*y.*z*1e-3;
The parabolic equation in toolbox syntax is
Suppose the thermal conductivity of the block leads to a coefficient value of 1. The values of the other coefficients in this problem are , , and .
d = 1; c = 1; a = 0; f = 0;
Create the finite element matrices that encode the problem.
[Kc,Fc,B,ud] = assempde(model,c,a,f); [~,M,~] = assema(model,0,d,f);
Solve the problem at time steps of 1 for times ranging from 0 to 40.
tlist = linspace(0,40,41); u = parabolic(u0,tlist,Kc,Fc,B,ud,M);
35 successful steps 0 failed attempts 72 function evaluations 1 partial derivatives 10 LU decompositions 71 solutions of linear systems
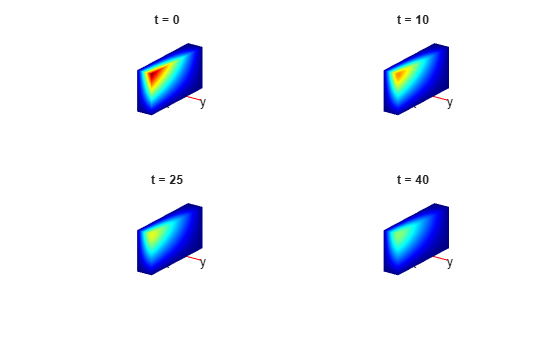
Plot the solution on the outside of the block at times 0, 10, 25, and 40. Ensure that the coloring is the same for all plots.
umin = min(min(u)); umax = max(max(u)); subplot(2,2,1) pdeplot3D(model,'ColorMapData',u(:,1)) colorbar off view(125,22) title 't = 0' clim([umin umax]); subplot(2,2,2) pdeplot3D(model,'ColorMapData',u(:,11)) colorbar off view(125,22) title 't = 10' clim([umin umax]); subplot(2,2,3) pdeplot3D(model,'ColorMapData',u(:,26)) colorbar off view(125,22) title 't = 25' clim([umin umax]); subplot(2,2,4) pdeplot3D(model,'ColorMapData',u(:,41)) colorbar off view(125,22) title 't = 40' clim([umin umax]);
Input Arguments
Output Arguments
Algorithms
Version History
Introduced before R2006aSee Also
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)