Perform Manual Gain-Tuning of Speed Controller
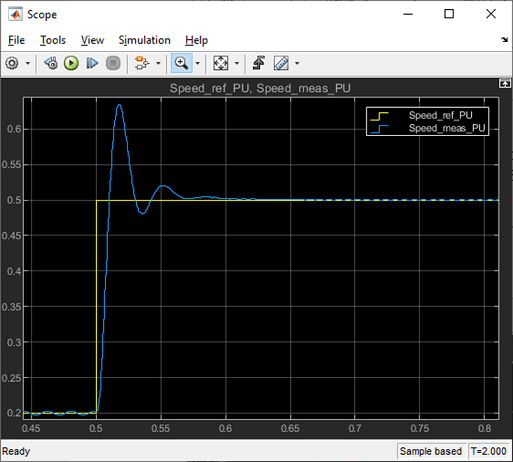
To manually tune the speed controller subsystem, provide a step input (in the range
0.2 to 0.5 PU) to the
Speed_ref_PU input in the speed controller subsystem (Speed
Control). Monitor the measured speed step response Speed_meas_PU and
adjust the speed controller subsystem parameters to meet your control objectives.
This figure shows the step response of the speed controller.
This procedure shows a method to implement speed control for a PMSM in simulation. Run the simulation and analyze the controller performance.
You can generate C code from this control algorithm using Embedded Coder®. In addition, you can deploy this code and the hardware drivers to the target hardware.