pcregisterfgr
Syntax
Description
[___] = pcregisterfgr(___,MaxIterations=
specifies the maximum number of iterations for the FGR algorithm, in addition to any
combination of arguments from previous syntaxes.numIterations)
Examples
Load point cloud data into the workspace.
ld = load("livingRoom.mat");
fixed = ld.livingRoomData{1};
moving = ld.livingRoomData{2};Visualize point cloud data before registration.
figure pcshowpair(moving,fixed,VerticalAxis="Y",VerticalAxisDir="Down")
To improve the efficiency and the accuracy of the FGR registration algorithm, downsample the point clouds.
fixedDownsampled = pcdownsample(fixed,gridNearest=0.05); movingDownsampled = pcdownsample(moving,gridNearest=0.05);
Register the point clouds using the FGR algorithm.
gridSize = 0.1; tform = pcregisterfgr(movingDownsampled,fixedDownsampled,gridSize,MaxIterations=100);
Visualize the alignment.
movingRegistered = pctransform(moving,tform); pcshowpair(movingRegistered,fixed,VerticalAxis="Y",VerticalAxisDir="Down");

Merge the point clouds and visualize the merged result.
mergeSize = 0.01; merged = pcmerge(movingRegistered,fixed,mergeSize); figure(Name = "merged point cloud after Fast Global registration"); pcshow(merged,VerticalAxis="Y",VerticalAxisDir ="Down");
Input Arguments
Output Arguments
Tips
To improve the accuracy and the efficiency of registration, downsample the point clouds using the
pcdownsamplefunction before using thepcregisterfgrfunction.For ground vehicle point clouds, you can improve performance and accuracy by removing the ground using
pcfitplaneorsegmentGroundFromLidarDatabefore registration. For details on how to do this, see thehelperProcessPointCloudfunction in the Build a Map from Lidar Data (Automated Driving Toolbox) example.To merge more than two point clouds, you can use the
pccatfunction instead of thepcmergefunction.
Algorithms
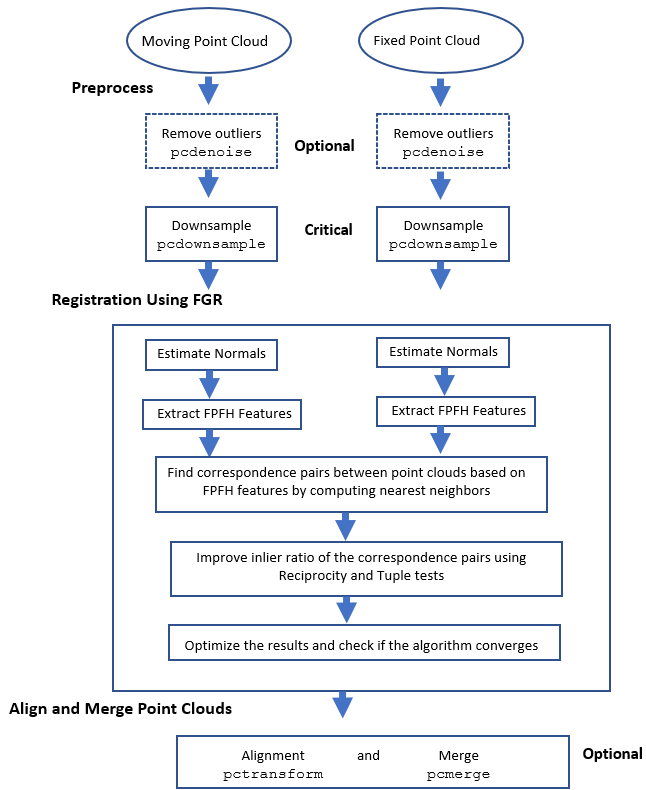
This figure shows the workflow of point cloud registration using the FGR algorithm.
References
[1] Zhou, Qian-Yi, Jaesik Park, and Vladlen Koltun. “Fast Global Registration.” In Computer Vision – ECCV 2016, edited by Bastian Leibe, Jiri Matas, Nicu Sebe, and Max Welling. Lecture Notes in Computer Science vol. 9906:766–82. Cham: Springer International Publishing, 2016.
Version History
Introduced in R2022b
See Also
Functions
pcregistericp|pcregisterndt|pcregistercpd|pctransform|pcshow|pcdownsample|pcfitplane|pcdenoise|pcmerge