pcfitcuboid
Fit cuboid to 3-D point cloud
Syntax
Description
model = pcfitcuboid(___,Name,Value)'AzimuthRange',[25
75] sets the angular range for the azimuth angles of the function.
Examples
Fit cuboid bounding boxes around clusters in a point cloud.
Load the point cloud data into the workspace.
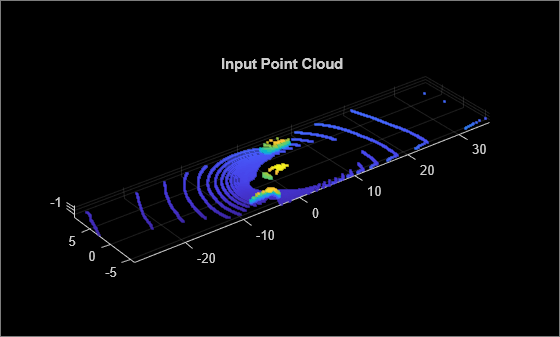
data = load('drivingLidarPoints.mat');Define and crop a region of interest (ROI) from the point cloud. Visualize the selected ROI of the point cloud.
roi = [-40 40 -6 9 -2 1]; in = findPointsInROI(data.ptCloud,roi); ptCloudIn = select(data.ptCloud,in); hcluster = figure; panel = uipanel('Parent',hcluster,'BackgroundColor',[0 0 0]); ax = axes('Parent',panel,'Color',[0 0 0]); pcshow(ptCloudIn,'MarkerSize',30,'Parent',ax) title('Input Point Cloud')
Segment the ground plane. Visualize the segmented ground plane.
maxDistance = 0.3; referenceVector = [0 0 1]; [~,inliers,outliers] = pcfitplane(ptCloudIn,maxDistance,referenceVector); ptCloudWithoutGround = select(ptCloudIn,outliers,'OutputSize','full'); hSegment = figure; panel = uipanel('Parent',hSegment,'BackgroundColor',[0 0 0]); ax = axes('Parent',panel,'Color',[0 0 0]); pcshowpair(ptCloudIn,ptCloudWithoutGround,'Parent',ax) legend('Ground Region','Non-Ground Region','TextColor', [1 1 1]) title('Segmented Ground Plane')

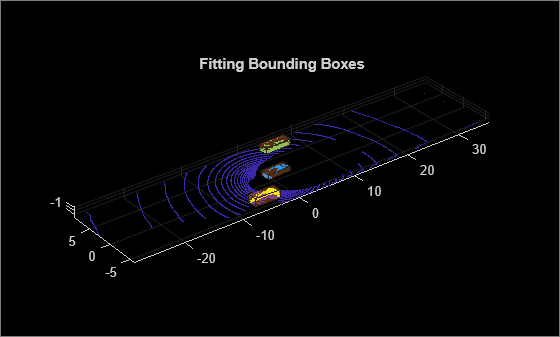
Segment the non-ground region of the point cloud into clusters. Visualize the segmented point cloud.
distThreshold = 1; [labels,numClusters] = pcsegdist(ptCloudWithoutGround,distThreshold); labelColorIndex = labels; hCuboid = figure; panel = uipanel('Parent',hCuboid,'BackgroundColor',[0 0 0]); ax = axes('Parent',panel,'Color',[0 0 0]); pcshow(ptCloudIn.Location,labelColorIndex,'Parent',ax) title('Fitting Bounding Boxes') hold on
Fit bounding box on each cluster, visualized as orange highlights.
for i = 1:numClusters idx = find(labels == i); model = pcfitcuboid(ptCloudWithoutGround,idx); plot(model) end
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
This function uses an L- shape based detection algorithm to fit cuboid to point cloud
data. For every point in the point cloud, the function iterates through all possible
directions of rectangle and finds the corresponding square errors. The possible directions for
the rectangle lie within [0, 90] degrees as the two sides of the rectangle are orthogonal. You
can specify the possible rectangle directions by using the AzimuthRange
argument. The function then selects the direction that has the least error and fits the
rectangle along that direction.
References
[1] Xiao Zhang, Wenda Xu, Chiyu Dong and John M. Dolan, "Efficient L-Shape Fitting for Vehicle Detection Using Laser Scanners", IEEE Intelligent Vehicles Symposium, June 2018
Extended Capabilities
Version History
Introduced in R2020b