cordiccos
CORDIC-based approximation of cosine
Description
Examples
Compare the results produced by various iterations of the cordiccos algorithm to the results of the double-precision cos function.
Create 1024 points between [0,2*pi).
stepSize = pi/512; thRadDbl = 0:stepSize:(2*pi - stepSize);
Set the fixed-point type to be a signed, 12-bit fixed-point data type. Use the cos function with a double-precision input as reference.
thRadFxp = fi(thRadDbl,1,12); cosThRef = cos(double(thRadFxp));
Use 12-bit quantized inputs and vary the number of iterations from 2 to 10. Compare the fixed-point CORDIC results to the double-precision trigonometric function results.
for niters = 2:2:10 cdcCosTh = cordiccos(thRadFxp,niters); errCdcRef = cosThRef - double(cdcCosTh); end
Plot the results.
figure hold on axis([0 2*pi -1.25 1.25]); plot(thRadFxp,cosThRef,'b'); plot(thRadFxp,cdcCosTh,'g'); plot(thRadFxp,errCdcRef,'r'); ylabel('cos(\Theta)'); gca.XTick = 0:pi/2:2*pi; gca.XTickLabel = {'0','pi/2','pi','3*pi/2','2*pi'}; gca.YTick = -1:0.5:1; gca.YTickLabel = {'-1.0','-0.5','0','0.5','1.0'}; ref_str = 'Reference: cos(double(\Theta))'; cdc_str = sprintf('12-bit CORDIC cosine; N = %d',niters); err_str = sprintf('Error (max = %f)', max(abs(errCdcRef))); legend(ref_str,cdc_str,err_str);
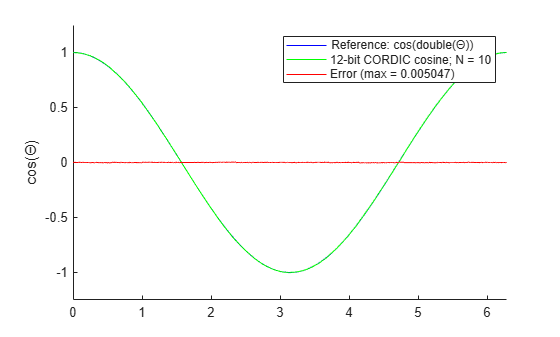
After 10 iterations, the CORDIC algorithm has approximated the cosine of theta to within 0.005187 of the double-precision cosine result.
Input Arguments
Output Arguments
Algorithms

X represents the sine, Y represents the cosine, and Z represents theta. The accuracy of the CORDIC rotation kernel depends on the choice of initial values for X, Y, and Z. This algorithm uses the following initial values:
References
[1] Volder, Jack E. “The CORDIC Trigonometric Computing Technique.” IRE Transactions on Electronic Computers EC-8, no. 3 (Sept. 1959): 330–334.
[2] Andraka, Ray. “A Survey of CORDIC Algorithm for FPGA Based Computers.” In Proceedings of the 1998 ACM/SIGDA Sixth International Symposium on Field Programmable Gate Arrays, 191–200. https://dl.acm.org/doi/10.1145/275107.275139.
[3] Walther, J.S. “A Unified Algorithm for Elementary Functions.” In Proceedings of the May 18-20, 1971 Spring Joint Computer Conference, 379–386. https://dl.acm.org/doi/10.1145/1478786.1478840.
[4] Schelin, Charles W. “Calculator Function Approximation.” The American Mathematical Monthly, no. 5 (May 1983): 317–325. https://doi.org/10.2307/2975781.
Extended Capabilities
Version History
Introduced in R2010a