getRoadRunnerHDMap
Description
rrMap = getRoadRunnerHDMap(scenario)rrMap for the road network and static
actors in the driving scenario, scenario. RoadRunner HD Map is a road data model for representing high-definition ma data in a
RoadRunner scene. Use the rrMap object to inspect the scenario
representation and modify elements. Then, you can writerrMap to a
.rrhd binary file using the write
function, and import the .rrhd file into RoadRunner.There may be variations between the original scenario and the exported
scenario. For details, see Limitations.
Examples
This example shows how to create a RoadRunner HD Map from a driving scenario. It also shows how to build the HD Map as a scene in RoadRunner. This step requires a RoadRunner Scene Builder license.
Create a driving scenario object.
scenario = helperCreateDrivingScenario;
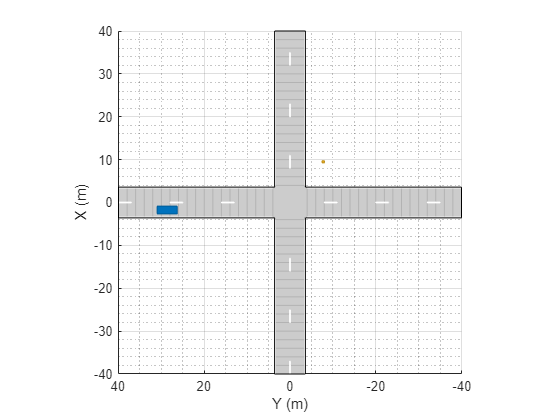
Plot the scenario.
plot(scenario)
Export the driving scenario directly to a .rrhd binary file.
export(scenario,"RoadRunner HD Map","directExportScenario.rrhd")
Alternatively, you can first get the RoadRunner HD Map object for the scenario and plot it.
rrMap = getRoadRunnerHDMap(scenario); plot(rrMap)

You can inspect it and make any desired modifications. Then, write the RoadRunner HD Map to a .rrhd binary file.
write(rrMap,'4wayIntersection.rrhd')Import the map into RoadRunner. Specify the import options to enable overlap groups.
rrApp = roadrunner("D:\RR\TestProjects"); impOpts = roadrunnerHDMapImportOptions(BuildOptions=roadrunnerHDMapBuildOptions(EnableOverlapGroupsOptions=enableOverlapGroupsOptions(IsEnabled=false))); importScene(rrApp,fullfile(pwd,"4wayIntersection.rrhd"),"RoadRunner HD Map",impOpts)

Helper Functions
helperCreateDrivingScenario creates a four way intersection driving scenario with an ego vehicle and a pedestrian.
function scenario = helperCreateDrivingScenario % Create scenario and add roads scenario = drivingScenario; roadCenters = [0 40 0; 0 -40 0]; marking = [laneMarking('Solid') laneMarking('Dashed') laneMarking('Solid')]; laneSpecification = lanespec(2, 'Width', 3.5, 'Marking', marking); road(scenario, roadCenters, 'Lanes', laneSpecification, 'Name', 'Road'); roadCenters = [-40 0 0; 40 0 0]; marking = [laneMarking('Solid') laneMarking('Dashed') laneMarking('Solid')]; laneSpecification = lanespec(2, 'Width', 3.5, 'Marking', marking); road(scenario, roadCenters, 'Lanes', laneSpecification, 'Name', 'Road1'); % Add ego vehicle egoVehicle = vehicle(scenario, ... 'ClassID', 1, ... 'Position', [-1.75 30 0], ... 'FrontOverhang', 0.9, ... 'Wheelbase', 2.8, ... 'Mesh', driving.scenario.carMesh, ... 'Name', 'Vehicle Under Test'); waypoints = [-1.75 30 0; -1.75 10.629767723813 0; -0.980075893866154 4.2738387109925 0; 4.2738387109925 -0.980075893866154 0; 10.629767723813 -1.75 0; 30 -1.75 0]; speed = 2.77777777777778; yaw = [-90;-90;-69.38;-20.62;0;0]; smoothTrajectory(egoVehicle, waypoints, speed, 'Yaw', yaw); % Add the non-ego actors euroncappedestriantarget = actor(scenario, ... 'ClassID', 4, ... 'Length', 0.6, ... 'Width', 0.5, ... 'Height', 1.8, ... 'Position', [9.5 -7.75 0], ... 'PlotColor', [237 177 32] / 255, ... 'Name', 'Euro NCAP Pedestrian Target'); waypoints = [9.5 -7.75 0; 9.5 -6.75 0; 9.5 10 0]; speed = [0;1.38888888888889;1.38888888888889]; waittime = [7.82;0;0]; trajectory(euroncappedestriantarget, waypoints, speed, waittime); end
Input Arguments
Output Arguments
RoadRunner HD Map Export Limitations
A RoadRunner Scene Builder license is required to build a scene from the HD map file. Without a RoadRunner Scene Builder license, you can import the HD map file and only view the map as nodes and links in RoadRunner.
Composite Lane Specifications
Roads that use composite lane specifications (
compositeLaneSpec) and form loops or intersect with themselves are not supported.Composite lane specifications for creating roads with varying widths are not supported
Lane Markings and Lane Type
For lane markings created using the
laneMarkingobject and lane types created using thelaneTypeobject, onlyColorname-value argument is supported. Only white and yellow colors are supported.For roads that form loops, multiple lane marking styles are not supported.
Parking Lot
Driving scenarios containing parking lots added using the
parkingLotfunction are not supported.
Barriers
Barriers with gaps between segments created using the
barrierfunction withSegmentGapname-value argument, are not supported. Such barriers will be laid out without any gaps in the RoadRunner HD map representation.For barriers, setting the
SegmentLength,Width, andHeightproperties are not supported. These properties are calculated automatically based on the asset size during import to RoadRunner.
Static Actors
Static actors such as pedestrians and bicycles are not supported. To represent these actors in RoadRunner, you can either download a cuboid FBX and place it under Assets/Vehicles/ or edit the map to point to their own assets.
Road Groups and Road Networks
Road junctions and intersections added using the
roadGroupfunction are not supported.Road networks created using the
roadNetworkfunction are not supported when they use road groups.
Version History
Introduced in R2023a