roadNetwork
Add road network to driving scenario
Syntax
Description
OpenDRIVE
roadNetwork(
uses the name-value pair scenario,'OpenDRIVE',filename,'ShowLaneTypes',showLaneTypes)'ShowLaneTypes' to also import lane
type information from the file and display it in the driving scenario.
Note
As of R2021b, the ASAM OpenDRIVE import feature offers functional and visual improvements, as well as a few additional limitations.
You can now import roads with multiple lane specifications.
Imported roads show boundary lines that were not shown previously.
Road centers always appear in the middle of imported roads. Previously, some roads were showing road centers on the road edges.
Junctions are represented using a
RoadGroupobject that combines road segments within a junction. Previously, each road segment within a junction was represented separately. As a result, imported road networks now use a smaller number of roads.The road IDs, number of roads, junction IDs, and number of junctions in a driving scenario may not match those specified in the imported ASAM OpenDRIVE file.
HERE HD Live Map
OpenStreetMap
Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0)
roadNetwork(
imports roads from a Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0)
2
road network into a driving scenario. The function imports the
roads that are nearest to the latitude and longitude coordinates specified in
scenario,'ZenrinJapanMap',lat,lon)lat and lon, respectively.
Importing roads from the Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) service requires Automated Driving Toolbox Importer for Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) Service.
Examples
Create an empty driving scenario.
scenario = drivingScenario;
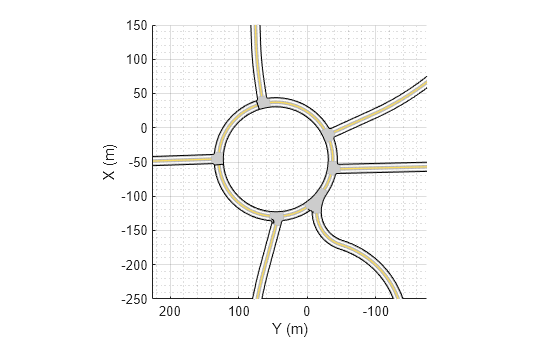
Import an ASAM OpenDRIVE road network into the scenario.
filePath = 'roundabout.xodr'; roadNetwork(scenario,'OpenDRIVE',filePath);
Plot the scenario and zoom in on the road network by setting the axes limits.
plot(scenario) xlim([-250 150]) ylim([-175 225])
Create an empty driving scenario.
scenario = drivingScenario;
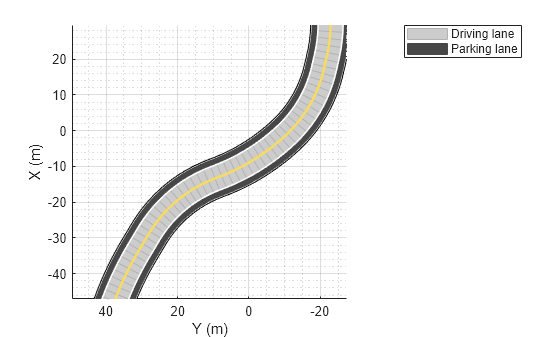
Import an ASAM OpenDRIVE® road composed of driving and parking lanes into the scenario. By default, the function interprets the lane type information and imports the lanes into driving scenario without altering the lane type.
filePath = 'parking.xodr'; roadNetwork(scenario,'OpenDRIVE',filePath);
Plot the scenario.
plot(scenario) zoom(2) legend('Driving lane','Parking lane')
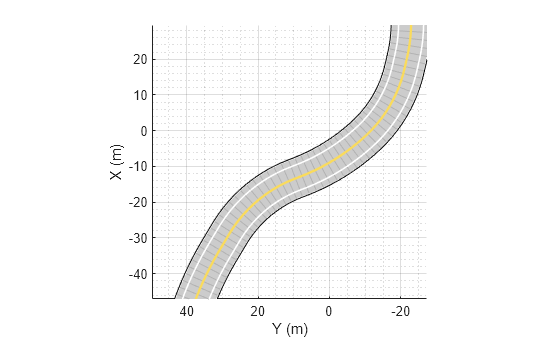
Import the ASAM OpenDRIVE road into the scenario. Set the 'ShowLaneTypes' value to false to suppress multiple lane types. The function ignores the lane type information and imports all the lanes as driving lanes.
scenario = drivingScenario; roadNetwork(scenario,'OpenDRIVE',filePath,'ShowLaneTypes',false); plot(scenario) zoom(2)
Import HERE HDLM road network data that is nearest to the coordinates of a specified driving route into a driving scenario. Plot a vehicle following this route in the driving scenario.
Load a sequence of geographic coordinates that correspond to a driving route.
data = load('geoSequence.mat');
lat = data.latitude;
lon = data.longitude;
Display the route by streaming the coordinates on a geographic player. Set the zoom level to 14 and configure the player to display all points in its history. To speed up the streaming, plot only every tenth coordinate in the route.
zoomLevel = 14; player = geoplayer(lat(1),lon(1),zoomLevel,'HistoryDepth',Inf); timestep = 10; for i = 1:timestep:length(lat) plotPosition(player,lat(i),lon(i)); end

Create a driving scenario. Import the HERE HDLM road data that is nearest to the driving route into the scenario.
scenario = drivingScenario;
roadNetwork(scenario,'HEREHDLiveMap',lat,lon);
Use the latlon2localGeoReference property of the scenario. The origin is the first coordinate specified in the driving route. Because the driving route contains only latitudinal and longitudinal data, set the altitude to 0.
alt = 0; origin = scenario.GeoReference; [xEast,yNorth,zUp] = latlon2local(lat,lon,alt,origin);
Add a vehicle to the driving scenario. Specify the converted driving route as the trajectory of the vehicle. Set a vehicle speed of 30 meters per second.
v = vehicle(scenario,'ClassID',1);
speed = 30;
smoothTrajectory(v,[xEast,yNorth,zUp],speed);
Plot the scenario and pause every 0.01 seconds to slow down the simulation. To maintain the same alignment with geographic coordinate displays, the X-axis is on the bottom and the Y-axis is on the left. In driving scenarios not imported from maps, the X-axis is on the left and the Y-axis is on the bottom. This alignment is consistent with the Automated Driving Toolbox™ world coordinate system.
After a few seconds, the vehicle appears to drive underneath the road. This issue occurs because the converted trajectory contains no altitude data but the imported road network does. To avoid this issue, if you are specifying a driving route recorded from a GPS, include the altitude data.
plot(scenario) while advance(scenario) pause(0.01) end

Import HERE HDLM road network data into driving scenario. Select this data from a region that is centered around a specified geographic coordinate.
Define a latitude and longitude coordinates corresponding to a roundabout.
latCenter = 42.302324; lonCenter = -71.384970;
Specify the minimum and maximum latitudinal and longitudinal coordinates for a rectangular region around the roundabout. Display a bounding box corresponding to this region on a geographic plot.
offset = 5e-4; minLat = latCenter - offset; minLon = lonCenter - offset; maxLat = latCenter + offset; maxLon = lonCenter + offset; gx = geoaxes; LineSpec = '.-k'; geoplot(gx, ... [minLat maxLat],[minLon minLon],LineSpec, ... [maxLat maxLat],[minLon maxLon],LineSpec, ... [maxLat minLat],[maxLon maxLon],LineSpec, ... [minLat minLat],[maxLon minLon],LineSpec)

Create a driving scenario and import roads from the region by using the minimum and maximum coordinates. The roadNetwork function imports roads that are at least partially within this region.
scenario = drivingScenario;
roadNetwork(scenario,'HEREHDLiveMap',minLat,minLon,maxLat,maxLon);Plot the scenario. To maintain the same alignment with geographic coordinate displays, the X-axis is on the bottom and the Y-axis is on the left. In driving scenarios not imported from maps, the X-axis is on the left and the Y-axis is on the bottom. This alignment is consistent with the Automated Driving Toolbox™ world coordinate system.
plot(scenario)

Import roads from the OpenStreetMap® web service into a driving scenario. Then, plot a vehicle following a route in the imported road network.
Import a road network of the MathWorks® Apple Hill campus into an empty driving scenario. The file was downloaded from https://www.openstreetmap.org, which provides access to crowd-sourced map data all over the world. The data is licensed under the Open Data Commons Open Database License (ODbL), https://opendatacommons.org/licenses/odbl/.
Plot the imported road network. To maintain the same alignment with geographic coordinate displays, the X-axis is on the bottom and the Y-axis is on the left. In driving scenarios not imported from maps, the X-axis is on the left and the Y-axis is on the bottom. This alignment is consistent with the Automated Driving Toolbox™ world coordinate system.
scenario = drivingScenario; roadNetwork(scenario,'OpenStreetMap','applehill.osm'); plot(scenario)

Load the latitude and longitude coordinates for a driving route in this road network.
data = load('geoRouteAH.mat');
lat = data.latitude;
lon = data.longitude;
Use the latlon2localGeoReference property of the scenario. The origin is the first coordinate specified in the driving route. Because the driving route contains only latitudinal and longitudinal data, set the altitude to 0.
alt = 0; origin = scenario.GeoReference; [xEast,yNorth,zUp] = latlon2local(lat,lon,alt,origin);
Add a vehicle to the driving scenario. Specify the converted driving route as the trajectory of the vehicle. Set a vehicle speed of 30 meters per second. Plot the vehicle trajectory and pause every 0.01 seconds to slow down the simulation.
v = vehicle(scenario,'ClassID',1); speed = 30; smoothTrajectory(v,[xEast,yNorth,zUp],speed); while advance(scenario) pause(0.01) end

Import Zenrin Japan Map 3.0 (Itsumo NAVI API 3.0) road network data that is nearest to the coordinates of a specified driving route into a driving scenario. Plot a vehicle following this route in the driving scenario.
Load a sequence of geographic coordinates that correspond to a driving route.
data = load('tokyoSequence.mat');
lat = data.latitude;
lon = data.longitude;Display the route by streaming the coordinates on a geographic player. Set the zoom level to 17 and configure the player to display all points in its history. To speed up the streaming, plot only every tenth coordinate in the route.
zoomLevel = 17; player = geoplayer(lat(1),lon(1),zoomLevel,'HistoryDepth',Inf); timestep = 10; for i = 1:timestep:length(lat) plotPosition(player,lat(i),lon(i)); end

Create a driving scenario. Import the Zenrin Japan Map 3.0 (Itsumo NAVI API 3.0) road data that is nearest to the driving route into the scenario.
scenario = drivingScenario;
roadNetwork(scenario,'ZenrinJapanMap',lat,lon)Use the latlon2local function to convert the driving route from geographic coordinates to local east-north-up (ENU) Cartesian coordinates used in the driving scenario. For the origin of the ENU coordinate system, use the geographic road network origin stored in the GeoReference property of the scenario. The origin is the first coordinate specified in the driving route.
alt = 0; origin = scenario.GeoReference; [xEast,yNorth,zUp] = latlon2local(lat,lon,alt,origin);
Add a vehicle to the driving scenario. Specify the converted driving route as the trajectory of the vehicle. Set a vehicle speed of 30 meters per second.
v = vehicle(scenario,'ClassID',1);
speed = 30;
smoothTrajectory(v,[xEast,yNorth,zUp],speed);Plot the scenario and pause every 0.01 seconds to slow down the simulation. To maintain the same alignment with geographic coordinate displays, the X-axis is on the bottom and the Y-axis is on the left. In driving scenarios not imported from maps, the X-axis is on the left and the Y-axis is on the bottom. This alignment is consistent with the Automated Driving Toolbox™ world coordinate system.
figure plot(scenario) while advance(scenario) pause(0.01) end

Import Zenrin Japan Map 3.0 (Itsumo NAVI API 3.0) road network data into a driving scenario. Select this data from a region that is centered around a specified geographic coordinate.
Define latitude and longitude coordinates corresponding to a park.
latCenter = 35.6889; lonCenter = 139.8458;
Specify the minimum and maximum latitude and longitude coordinates for a rectangular region around the park. Display a bounding box corresponding to this region on a geographic plot.
offset = 0.0013; minLat = latCenter - offset; minLon = lonCenter - offset; maxLat = latCenter + offset; maxLon = lonCenter + offset; figure gx = geoaxes; LineSpec = '.-k'; geoplot(gx, ... [minLat maxLat],[minLon minLon],LineSpec, ... [maxLat maxLat],[minLon maxLon],LineSpec, ... [maxLat minLat],[maxLon maxLon],LineSpec, ... [minLat minLat],[maxLon minLon],LineSpec)

Create a driving scenario and import roads from the region by using the minimum and maximum coordinates. The roadNetwork function imports roads that are at least partially within this region.
scenario = drivingScenario;
roadNetwork(scenario,'ZenrinJapanMap',minLat,minLon,maxLat,maxLon) Plot the scenario. To maintain the same alignment with geographic coordinate displays, the X-axis is on the bottom and the Y-axis is on the left. In driving scenarios not imported from maps, the X-axis is on the left and the Y-axis is on the bottom. This alignment is consistent with the Automated Driving Toolbox™ world coordinate system.
figure plot(scenario)

Input Arguments
Driving scenario, specified as a drivingScenario object.
scenario must contain no previously created or
imported roads.
Name of the road network file, specified as a character vector or string scalar.
filename must specify a file in the current folder, a
file that is on the MATLAB® search path, or a full or relative path to a file.
filename must end with a file extension that is valid
for the source of the road network.
| Road Network Source | Valid File Extensions | Sample Syntax |
|---|---|---|
| OpenDRIVE |
|
roadNetwork(scenario, ... 'OpenDRIVE','C:\Desktop\roads.xodr' |
| OpenStreetMap |
|
roadNetwork(scenario, ... 'OpenStreetMap','C:\Desktop\map.osm' |
Import lane type information from the OpenDRIVE road network file and display it in the driving scenario,
specified as a comma-separated pair consisting of
'ShowLaneTypes' and one of these values:
trueor 1 — Import lane type information and render lane types.falseor 0 — Ignore lane type information and import all lanes as driving lanes in the driving scenario.
The table summarized the supported lane types and their default appearance after importing them into the driving scenario.
| Supported Lane Types | Description | Default Appearance |
| Driving lanes | Lanes for driving |
|
| Border lanes | Lanes at the road borders |
|
| Restricted lanes | Lanes reserved for high-occupancy vehicles |
|
| Shoulder lanes | Lanes reserved for emergency stopping |
|
| Parking lanes | Lanes alongside driving lanes, intended for parking vehicles |
|

Any other unsupported lane types are rendered as border lanes.
Example: 'ShowLaneTypes',false
Latitude coordinates, specified as a vector of elements in the range [–90,
90]. lat must be the same size as
lon. Units are in degrees.
Longitude coordinates, specified as a vector of elements in the range
[–180, 180]. lon must be the same size as
lat. Units are in degrees.
Minimum latitude coordinate of the bounding box, specified as a scalar in
the range [–90, 90]. minLat must be less than
maxLat. Units are in degrees.
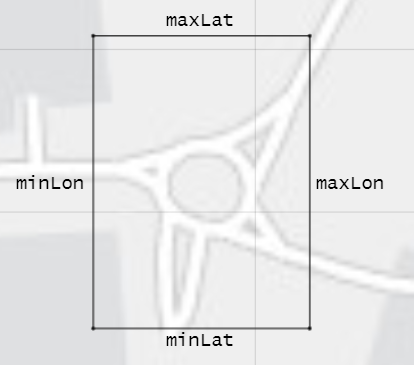
The roadNetwork function imports any roads
that are at least partially within the bounding box specified by inputs
minLat, minLon, maxLat, and
maxLon. This diagram displays the relationship between these coordinates.
Minimum longitude coordinate of the bounding box, specified as a scalar in
the range [–180, 180]. minLon must be less than
maxLon. Units are in degrees.
The roadNetwork function imports any roads
that are at least partially within the bounding box specified by inputs
minLat, minLon, maxLat, and
maxLon. This diagram displays the relationship between these coordinates.
Maximum latitude coordinate of the bounding box, specified as a scalar in
the range [–90, 90]. maxLat must be greater than
minLat. Units are in degrees.
The roadNetwork function imports any roads
that are at least partially within the bounding box specified by inputs
minLat, minLon, maxLat, and
maxLon. This diagram displays the relationship between these coordinates.
Maximum longitude coordinate of the bounding box, specified as a scalar in
the range [–180, 180]. maxLon must be greater than
minLon. Units are in degrees.
The roadNetwork function imports any roads
that are at least partially within the bounding box specified by inputs
minLat, minLon, maxLat, and
maxLon. This diagram displays the relationship between these coordinates.
Limitations
OpenDRIVE Import Limitations
You can import only lanes, lane type information, and roads. The import of road objects and traffic signals is not supported.
ASAM OpenDRIVE files containing large road networks can take up to several minutes to load. Examples of large road networks include ones that model the roads of a city or ones with roads that are thousands of meters long.
Lanes with variable widths are not supported. The width is set to the highest width found within that lane. For example, if a lane has a width that varies from 2 meters to 4 meters, the function sets the lane width to 4 meters throughout.
When you import one-way roads with multiple lane specifications, the function supports only those segment taper positions that match the travel direction of lane. For example, the function supports importing only right taper position for the right lanes. Left or both types of taper position are not supported for right lanes.
Roads with lane type information specified as
driving,border,restricted,shoulder, andparkingare supported. Lanes with any other lane type information are imported as border lanes.Lane marking styles
Bott Dots,Curbs, andGrassare not supported. Lanes with these marking styles are imported as unmarked.
HERE HD Live Map Import Limitations
Importing HERE HDLM roads with lanes of varying widths is not supported. In the generated road network, each lane is set to have the maximum width found along its entire length. Consider a HERE HDLM lane with a width that varies from 2 to 4 meters along its length. In the generated road network, the lane width is 4 meters along its entire length. This modification to road networks can sometimes cause roads to overlap in the driving scenario.
Some issues with the imported roads might be due to missing or inaccurate map data in the HERE HDLM service. For example, you might see black lines where roads and junctions meet. To check where the issue stems from in the map data, use the HERE HD Live Map Viewer to view the geometry of the HERE HDLM road network. This viewer requires a valid HERE license. For more details, see the HERE Technologies website.
OpenStreetMap Import Limitations
When importing OpenStreetMap data, road and lane features have these limitations:
To import complete lane-level information, the OpenStreetMap must contain the
lanesandlanes:backwardtags. Based on the data in thelanesandlanes:backwardtags, these lane specifications are imported:One-way roads are imported with the data in the
lanestag. These lanes are programmatically equivalent tolanespec(lanes).Two-way roads are imported based on the data in both
lanesandlanes:backwardtags. These lanes are programmatically equivalent tolanespec([lanes:backward numLanesForward]), wherenumLanesForward = lanes - lanes:backward.For roads that are not one-way without
lanes:backwardtag specified, number of lanes in the backward direction are imported asuint64(lanes/2). These lanes are programmatically equivalent tolanespec([uint64(lanes/2) numLanesForward]), wherenumLanesForward = lanes - uint64(lanes/2).
If
lanesandlanes:backwardare not present in the OpenStreetMap, then lane specifications are based only on the direction of travel specified in the OpenStreetMap road network, where:One-way roads are imported as single-lane roads with default lane specifications. These lanes are programmatically equivalent to
lanespec(1).Two-way roads are imported as two-lane roads with bidirectional travel and default lane specifications. These lanes are programmatically equivalent to
lanespec([1 1]).
The table shows these differences in the OpenStreetMap road network and the road network in the imported driving scenario.
OpenStreetMap Road Network Imported Driving Scenario 

When importing OpenStreetMap road networks that specify elevation data, if elevation data is not specified for all roads being imported, then the generated road network might contain inaccuracies and some roads might overlap. To prevent overlapping, ways in the OpenStreetMap file must specify the vertical stacking relationship of overlapping roads using the
layertags.OpenStreetMap files containing large road networks can take a long time to load. In addition, these road networks can make some of the app options unusable. To avoid this limitation, import files that contain only an area of interest, typically smaller than 20 square kilometers.
The basemap used in the app can have slight differences from the map used in the OpenStreetMap service. Some imported road issues might also be due to missing or inaccurate map data in the OpenStreetMap service. To check whether the data is missing or inaccurate due to the map service, consider viewing the map data on an external map viewer.
Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) Import Limitations
When you import Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) data, the generated road network has these limitations. As a result of these limitations, the generated network might contain inaccuracies and the roads might overlap.
The generated road network uses road elevation data when the Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) provides it. Otherwise, the generated network uses terrain elevation data provided by the service.
When the Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) service provides information using a range, such as by specifying a road with two to three lanes or a road between 3–5.5 meters wide, the generated road network uses scalar values instead. Consider a Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) road that has two to three lanes. The generated road network has two lanes.
Lanes within roads in the generated network have a uniform width. Consider a road that is 4.25 meters wide with two lanes. In the generated road network, each lane is 2.125 meters wide.
Where possible, the generated road network uses road names provided by the Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) service. Otherwise, the generated road network uses default names, such as
Road1andRoad2.
Tips
If the roads that you import do not look as expected, consider importing them by using the Driving Scenario Designer app. The app can make the process of troubleshooting and correcting roads easier than trying to troubleshoot and correct them by using the
roadNetworkfunction.
Version History
Introduced in R2018b
See Also
Apps
Objects
Functions
Topics
- Import ASAM OpenDRIVE Roads into Driving Scenario
- Import HERE HD Live Map Roads into Driving Scenario
- Import OpenStreetMap Data into Driving Scenario
- Import Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) into Driving Scenario
- Scenario Generation from Recorded Vehicle Data
- Export Driving Scenario to ASAM OpenSCENARIO XML File
- Export Driving Scenario to ASAM OpenDRIVE File
1 You need to enter into a separate agreement with HERE in order to gain access to the HDLM services and to get the required credentials (access_key_id and access_key_secret) for using the HERE Service.
2 To gain access to the Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) service and get the required credentials (a client ID and secret key), you must enter into a separate agreement with ZENRIN DataCom CO., LTD.