Teaching Rigid Body Dynamics
Throughout this series, you'll learn how to implement a Lagrangian dynamics approach and derive equations of motion of rigid body systems using MATLAB®. The proposed workflow incorporates tasks involving both symbolic and numeric computing—a natural combination that leads to deeper learning engagements with students.

Learn about the computational thinking approach.
Spring-Mass-Damper System Case Study
Discover how MATLAB supports a computational thinking approach using the classic spring-mass-damper system.
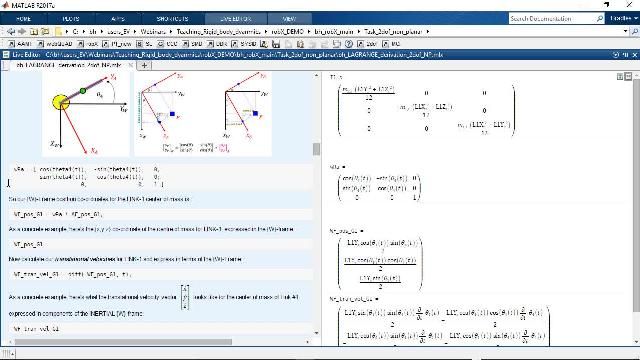
Two-Degrees-of-Freedom Non-Planar Robotic Manipulator Case Study
Explore a real-life case study that further explains the computational thinking approach using a larger two-degree-of-freedom system.

Review choices for implementing more automation for multi-degrees-of-freedom systems.
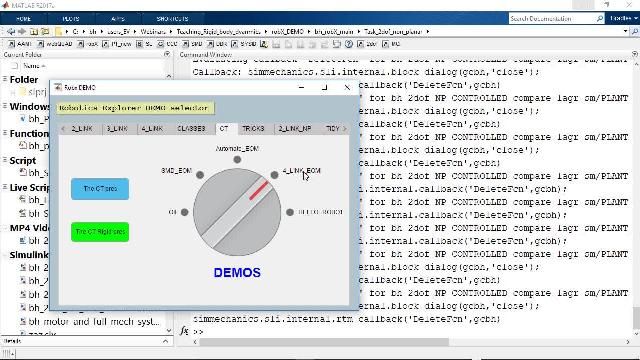
Four-Degrees-of-Freedom Non-Planar Robotic Manipulator Case Study
Explore the analysis and derivation of the equations of motion for a four-degrees-of-freedom robotic manipulator.

Summary of Computational Thinking Implementation
Review the key features in MATLAB that support a computational thinking approach when teaching rigid body dynamics.