Validation of MATLAB Electric vehicle model by using IPG CarMaker
This topic has been permanently closed and transferred to MATLAB Answers.
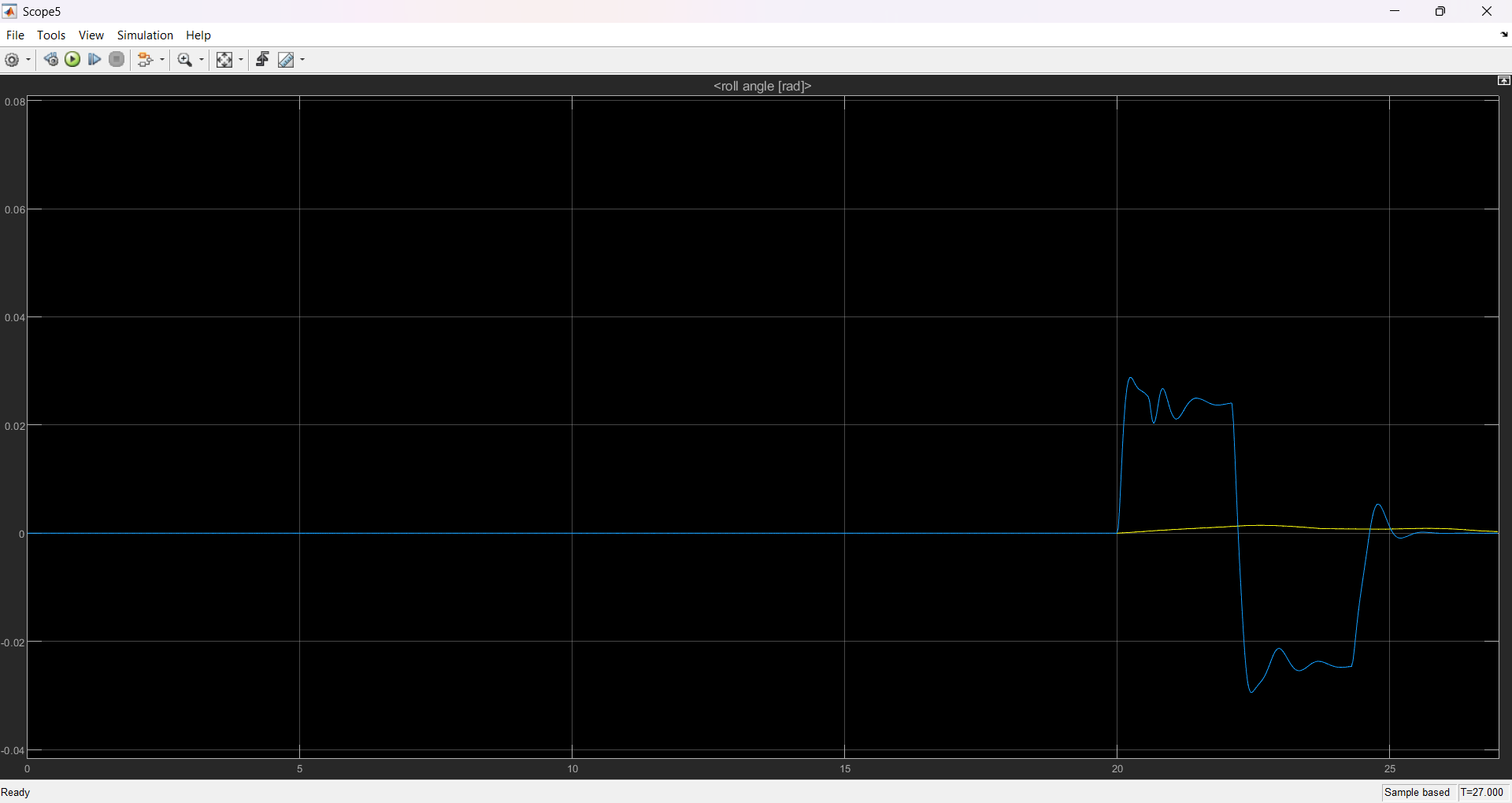
I have already created a 8-DOF electric vehicle model in MATLAB and during the verification method, I noticed that the roll angle does not really align with the data from CarMaker. I would like to seek for the oppinion from this community on how to improve the graph that I have obtained. I have also attatched the parameters of this vehicle as well as the graph that I have obtained. The blue plots indicates the data from a real world based electric model from CarMaker and yellow is from the 8-DOF model in matlab.
these are the vehicle parameters
data.g = 9.81; % [m/s^2] acceleration of gravity
data.f_res = 1.1e-2; % [-] rolling friction parameter
data.k_res = 6.5e-7; % [s^2/m^2] rolling friction coefficient
data.rho = 1.205; % [kg/m^3] air density
data.area = 2.156; % [m^2] cross section
data.cx = 0.30; % [-] drag coefficient
data.mass = 2200.10; % [kg] total vehicle mass
data.Jx = 552.75; % [kg*m^2] roll-axis inertia
data.Jz = 3002.5; % [kg*m^2] yaw-axis inertia
data.Jw = 2; % [kg*m^2] spin-axis inertia of wheel
data.radius = 0.3401; % [m] wheel radius
% Reduced Pacejka tyre model data
data.tyre_par(1) = 82.8868; % Pacejka coeff.
data.tyre_par(2) = 1.2070; % Pacejka coeff.
data.tyre_par(3) = 1.1351; % Pacejka coeff.
data.tyre_par(4) = 14.4035; % Pacejka coeff.
data.tyre_par(5) = 1.1932; % Pacejka coeff.
data.tyre_par(6) = -0.0001; % Pacejka coeff.
data.tyre_par(7) = 2.1219; % Pacejka coeff.
% Pacejka 5.2 tyre model data
tyre = ImportTyreData('.', 'Tyre_VSM.tir');
tyre = rmfield(tyre, 'file');
data.tyre_par_full = tyre;
data.wbase_f = 1.4727; % [m] front wheelbase
data.wbase_r = 1.4553; % [m] rear wheelbase
data.wbase = data.wbase_f + data.wbase_r; % [m] wheelbase
data.track = 1.655; % [m] track
data.h_cg = 0.631; % [m] centre of gravity height from ground
data.h_roll = 0.091; % [m] roll centre height from ground
data.k_roll_f = 8.67e4; % [Nm] roll stiffness at front
data.k_roll_r = 7.80e4; % [Nm] roll stiffness at rear
data.c_roll_f = 1.2e6; % [Nm/s] roll damping at front
data.c_roll_r = 6e5; % [Nm/s] roll damping at rear
data.k_act_roll = 0.9; % [-] active anti-roll coefficient
data.em_curve = [ % electric motor torque-speed curve
0, 900, 1000, 1100, 1200, 1300 % [RPM]
1500, 1500, 1400, 1000, 500, 0 % [Nm]
];
data.torque_bk_lb = -5e3; % [Nm] minimum brake torque