detect
Detect objects using YOLO v3 object detector
Syntax
Description
bboxes = detect(detector,I)I, using
a you only look once version 3 (YOLO v3) object detector, detector.
The input size of the image must be greater than or equal to the network input size of the
pretrained detector. The locations of objects detected are returned as a set of bounding
boxes.
Note
To use the pretrained YOLO v3 object detection networks trained on COCO dataset, you must install the Computer Vision Toolbox™ Model for YOLO v3 Object Detection. You can download and install the Computer Vision Toolbox Model for YOLO v3 Object Detection from Add-On Explorer. For more information about installing add-ons, see Get and Manage Add-Ons. To run this function, you will require the Deep Learning Toolbox™.
detectionResults = detect(detector,ds)read function of the input
datastore ds.
[___] = detect(___,
detects objects within the rectangular search region roi)roi, in addition
to any combination of arguments from previous syntaxes.
[___] = detect(___,
specifies options using one or more name-value arguments, in addition to any combination
of arguments from previous syntaxes.Name=Value)
Examples
Load a pretrained YOLO v3 object detector.
detector = yolov3ObjectDetector('tiny-yolov3-coco');Read a test image and preprocess the test image by using the preprocess function.
img = imread('sherlock.jpg');
img = preprocess(detector,img);Detect objects in the test image.
[bboxes,scores,labels] = detect(detector,img);
Display the detection results.
results = table(bboxes,labels,scores)
results=1×3 table
bboxes labels scores
________________________ ______ _______
133 67 283 278 dog 0.51784
detectedImg = insertObjectAnnotation(img,'Rectangle',bboxes,labels);
figure
imshow(detectedImg)
Load a pretrained YOLOv3 object detector.
detector = yolov3ObjectDetector('tiny-yolov3-coco');Read the test data and store as an image datastore object.
location = fullfile(matlabroot,'toolbox','vision','visiondata','vehicles'); imds = imageDatastore(location);
Detect objects in the test dataset. Set the Threshold parameter value to 0.3 and MiniBatchSize parameter value to 32.
detectionResults = detect(detector,imds,'Threshold',0.3,'MiniBatchSize',32);
Read an image from the test dataset and extract the corresponding detection results.
num = 10;
I = readimage(imds,num);
bboxes = detectionResults.Boxes{num};
labels = detectionResults.Labels{num};
scores = detectionResults.Scores{num};Perform non-maximal suppression to select strongest bounding boxes from the overlapping clusters. Set the OverlapThreshold parameter value to 0.2.
[bboxes,scores,labels] = selectStrongestBboxMulticlass(bboxes,scores,labels,'OverlapThreshold',0.2);Display the detection results.
results = table(bboxes,labels,scores)
results=3×3 table
bboxes labels scores
________________________ ______ _______
14 71 52 27 car 0.93352
74 73 7 5 car 0.65369
102 73 15 10 car 0.85313
detectedImg = insertObjectAnnotation(I,'Rectangle',bboxes,labels);
figure
imshow(detectedImg)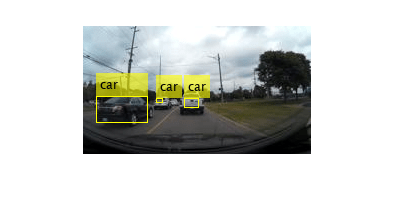
Load a pretrained YOLO v3 object detector.
detector = yolov3ObjectDetector('tiny-yolov3-coco');Read a test image.
img = imread('highway.png');Specify a region of interest (ROI) within the test image.
roiBox = [70 40 100 100];
Detect objects within the specified ROI.
[bboxes,scores,labels] = detect(detector,img,roiBox);
Display the ROI and the detection results.
img = insertObjectAnnotation(img,'Rectangle',roiBox,'ROI','AnnotationColor',"blue"); detectedImg = insertObjectAnnotation(img,'Rectangle',bboxes,labels); figure imshow(detectedImg)

Input Arguments
Name-Value Arguments
Output Arguments
Location of objects detected within the input image or images, returned as a
M-by-4 matrix or an M-by-5 matrix if the input is a single test image.
T-by-1 cell array if the input is an array of test images. T is the number of test images in the array. M is the number of bounding boxes in an image
The table describes the format of bounding boxes.
| Bounding Box | Description |
|---|---|
rectangle |
Defined in spatial coordinates as an M-by-4 numeric matrix with rows of the form [x y w h], where:
|
rotated-rectangle |
Defined in spatial coordinates as an M-by-5 numeric matrix with rows of the form [xctr yctr xlen ylen yaw], where:
|

Detection confidence scores for each bounding box, returned as one of these options:
M-by-1 numeric vector — The input is a single test image. M is the number of bounding boxes detected in the image.
B-by-1 cell array — The input is a batch of test images, where B is the number of test images in the batch. Each cell in the array contains an M-element row vector, where each element indicates the detection score for a bounding box in the corresponding image.
A higher score indicates higher confidence in the detection. The confidence score for each detection is a product of the corresponding objectness score and maximum class probability. The objectness score is the probability that the object in the bounding box belongs to a class in the image. The maximum class probability is the largest probability that a detected object in the bounding box belongs to a particular class.
Labels for bounding boxes, returned as one of these options:
M-by-1 categorical vector if the input is a single test image.
T-by-1 cell array if the input is an array of test images. T is the number of test images in the array. Each cell in the array contains a M-by-1 categorical vector containing the names of the object classes.
M is the number of bounding boxes detected in an image.
Detection results, returned as a 3-column table with variable names, Boxes, Scores, and Labels. The Boxes column can contain rectangles or rotated rectangle bounding boxes of the form :
rectangle — M-by-4 matrices, of M bounding boxes for the objects found in the image. Each row specifies a rectangle as a 4-element vector of the form [x,y,width,height], where (x,y) specifies the upper-left corner location and (width, height) specifies the size in pixels
rotated rectangle — M-by-5 matrices of M bounding boxes for the objects found in the image. Each row specifies a rotated rectangle as a 5-element vector of the form [xctr,yctr,width, height,yaw], where (xctr,yctr) specifies the center, (width,height) specifies the size, and yaw specifies the rotated angle.
Class probabilities and objectness scores of the detections, returned as a structure array with these fields.
ClassProbabilities— Class probabilities for each of the detections, returned as a B-by-1 cell array. B is the number of images in the input batch of images,I. Each cell in the array contains the class probabilities as an M-by-N numeric matrix. M is the number of bounding boxes and N is the number of classes. Each class probability is a numeric scalar, indicating the probability that the detected object in the bounding box belongs to a class in the image.ObjectnessScores— Objectness scores for each of the detections, returned as a B-by-1 cell array. B is the number of images in the input batch of images,I. Each cell in the array contains the objectness score for each bounding box as an M-by-1 numeric vector. M is the number of bounding boxes. Each objectness score is a numeric scalar, indicating the probability that the bounding box contains an object belonging to one of the classes in the image.