UAV Scenario Configuration
Libraries:
UAV Toolbox /
UAV Scenario and Sensor Modeling
Description
This block allows you to import a uavScenario object and
simulate the scenario. This block must be in a model that contains a UAV Scenario Lidar and
Motion blocks in order to test perception, control, and planning algorithms with data from a
uavScenario
environment. Models with a UAV Scenario can only use one UAV Scenario
Configuration block at a time and is not intended to be used in a cross-model
workflow. In a UAV scenario, this block must be executed before other UAV Scenario blocks.
Update the UAV Scenario Configuration block with the Refresh
button and click Apply to reflect any changes made to the
imported uavScenario in
MATLAB®.
This block internally stores motion states from platforms and sensors in a global data store memory block as buses within a bus with a name specified in the Scenario motion bus name parameter. The bus contains the following fields:
NumPlatforms — Number of UAV platforms in the scenario stored as a scalar.
Time — Simulation time associated with the motion state stored as a scalar.
Platforms — Bus array with name specified in the Platform motion bus name parameter containing all platforms in the UAV Scenario with each of the following fields:
PlatformID — ID of platform based on order of platforms in the
uavScenario.PlatformsProperty.Position — Position in NED frame specified as a 1-by-3 vector.
Orientation — Orientation in NED frame specified as a 1-by-4 vector, quaternion, frame rotation from NED frame to UAV body frame.
Velocity — Velocity in NED frame specified as a 1-by-3 vector.
Acceleration — Acceleration in NED frame specified as a 1-by-3 vector.
AngularVelocity — Angular velocity in NED frame specified as a 1-by-3 vector.
Examples
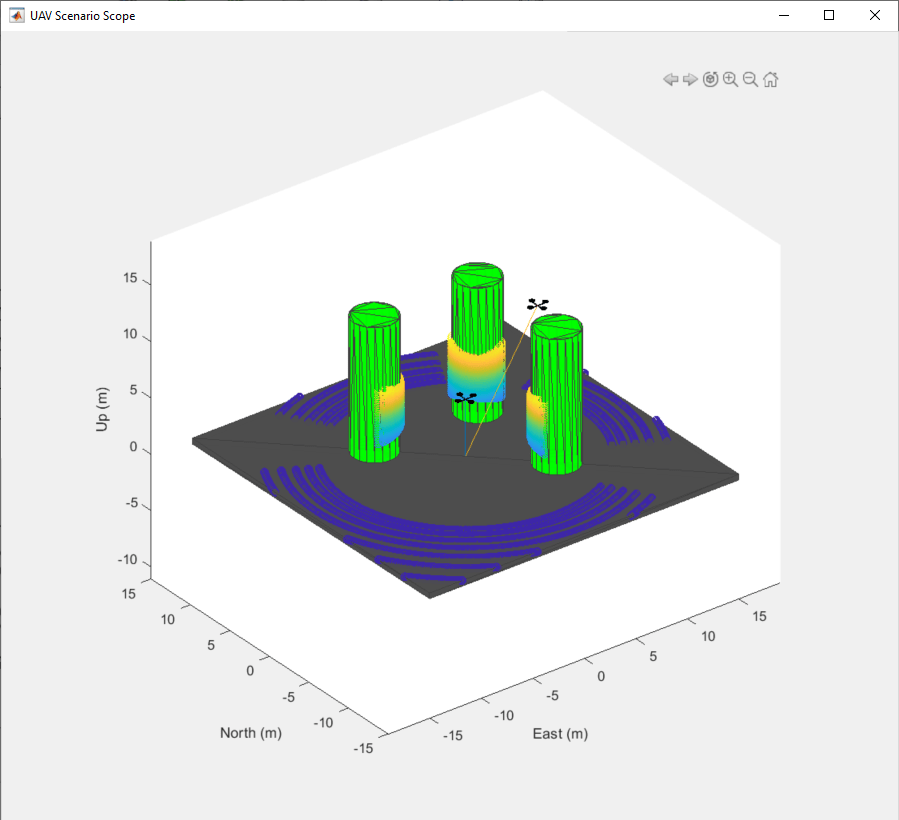
Simulate UAV Scenario Using Scenario Blocks
Use the UAV scenario blocks to simulate a scenario in Simulink®.
Limitations
The UAV Scenario blocks do not support:
Code generation
Model reference
Multiple instances of the UAV Scenario Configuration block
Rapid acceleration mode
In addition, the execution order is important when using these blocks in a closed loop simulation. The UAV Scenario Configuration block must execute first. The UAV Scenario Motion Write block must execute before the UAV Scenario Motion Read, UAV Scenario Lidar, and UAV Scenario Scope blocks.
Parameters
Version History
Introduced in R2021b
See Also
Objects
Blocks
- UAV Scenario Get Transform | UAV Scenario Lidar | UAV Scenario Motion Read | UAV Scenario Motion Write | UAV Scenario Scope