barometerSensor
Description
The barometerSensor
System object™ models a barometer sensor that generates an air pressure reading with a
measurement noise that consists of constant measurement bias, uncorrelated white noise, and
correlated noise [1]. For more information on the noise
model, see Noise Model.
To simulate a barometer sensor:
Create the
barometerSensorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Properties
Usage
Description
barometerReading = barometer(airPressure)
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
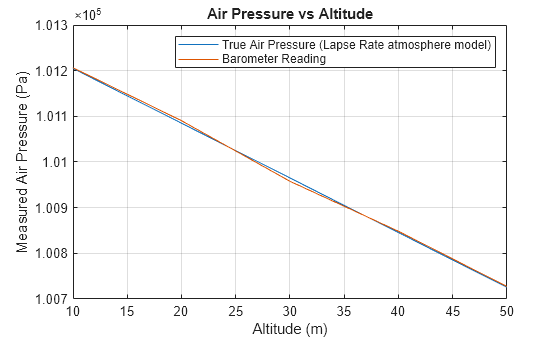
Specify a selection of altitudes in meters.
altitude = [10 20 30 40 50];
Use the atmoslapse (Aerospace Toolbox) atmospheric model to obtain the true air pressure at the specified altitudes.
g = 9.81; % Gravity acceleration in m/s^2 gamma = 1.4; % Heat ratio R = 287.0531; % Characteristic gas constant in J/(kg*K) L = 0.0065; % Lapse rate in K/m heightTroposphere = 10000; % Height of troposphere in m heightTropopause = 20000; % Height of tropopause in m rho0 = 1.225; % Air density at sea level in kg/m^3 T0 = 288.15; % Temperature at sea level in K P0 = 101325; % Atmospheric Pressure at sea level in Pa [~,~,pTrue] = atmoslapse(altitude,g,gamma,R,L, ... heightTroposphere,heightTropopause,rho0,P0,T0);
Create a barometer sensor with default parameters.
barometer = barometerSensor;
Obtain the air pressure reading from the true air pressure.
pMeasured = barometer(pTrue);
Plot the true air pressure and measured air pressure with respect to altitude.
plot(altitude,pTrue) hold on plot(altitude,pMeasured) title("Air Pressure vs Altitude") xlabel("Altitude (m)") ylabel("Measured Air Pressure (Pa)") legend(["True Air Pressure (Lapse Rate atmosphere model)","Barometer Reading"]) grid on hold off
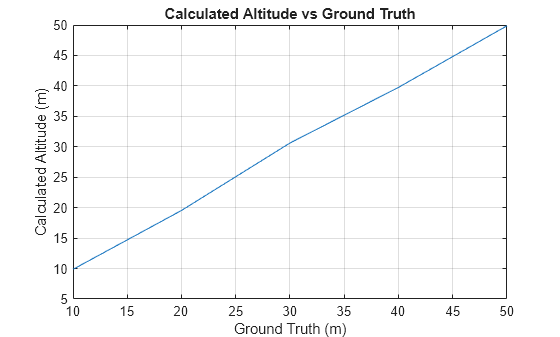
Use atmospalt (Aerospace Toolbox) to calculate the altitude above mean sea level in meters by using the measured air pressure.
pressureAltitude = atmospalt(pMeasured);
Plot the calculated altitude against ground truth altitude.
plot(altitude,pressureAltitude); title("Calculated Altitude vs Ground Truth") xlabel("Ground Truth (m)") ylabel("Calculated Altitude (m)") grid on
Identifying barometer noise parameters from a PX4 flight log enables you to create a barometer object with a similar noise characteristic to the barometer sensor that your flight controller uses.
Extract Barometer Data from Flight Log
Read the sample PX4 flight log.
logFile = "sampleLogBarometerExample.ulg";
data = ulogreader(logFile);Read the vehicle_air_data topic.
airdataTopic = readTopicMsgs(data,TopicNames="vehicle_air_data");
airdataTopicMessages = airdataTopic.TopicMessages{1};Extract the baro_pressure_pa message as a timetable that contains the measured air pressure in pascals.
timePeriodStart = airdataTopicMessages.timestamp(1); timePeriodEnd = airdataTopicMessages.timestamp(end); baroPressurePa = airdataTopicMessages(airdataTopicMessages.timestamp < timePeriodEnd ... & airdataTopicMessages.timestamp > timePeriodStart,"baro_pressure_pa");
Preprocess the measured air pressure data by resampling it to a fixed interval of 0.5 seconds, and by removing the absolute air pressure to isolate the noise component.
barometerTs = 0.05;
baroPressurePa = retime(baroPressurePa,timePeriodStart:seconds(barometerTs):timePeriodEnd,"linear");
baroPressurePaNoise = baroPressurePa.baro_pressure_pa - mean(baroPressurePa.baro_pressure_pa(1:1000));Identify Noise Parameters with ARMA Model
To identify the noise parameters, model the barometer noise with autoregressive moving average (ARMA) model, given by the equation:
.
Create an iddata object to store the time-domain output of the air pressure measurement, and then use the armax function to estimate the parameters of the ARMA model.
baroPressurePaNoiseDouble = double(baroPressurePaNoise); sysdata = iddata(baroPressurePaNoiseDouble,[],barometerTs); [sys,ic] = armax(sysdata,[1 1]);
The overall barometer noise shaping filter is given by
.
By comparing the terms of the ARMA model and the barometer noise shaping filter, you can determine that:
In addition, is the standard deviation of the ARMA system noise.
a = sys.A(2); b = sys.C(2); Ho = sqrt(sys.NoiseVariance);
Obtain the barometer sensor decay factor.
barometerDecayFactor = -a;
Obtain the barometer sensor noise density.
tauO = (1-b)/(1+b)*barometerTs/2; tauP = (1-a)/(1+a)*barometerTs/2; tau = tauP; sqrtOfSumOfSquares = Ho*(1+2*tauP/barometerTs)/(1+2*tauO/barometerTs); alpha = tauO/tau*sqrtOfSumOfSquares; sigmaU = alpha; barometerNoiseDensity = sigmaU/sqrt(barometerTs);
Obtain the barometer sensor bias instability.
beta = sqrtOfSumOfSquares*sqrt(1-(tauO/tau)^2); barometerBiasInstability = beta/sqrt(2*tau);
Create a barometer sensor object with the parameters that you obtained.
barometerModel = barometerSensor(SampleRate=barometerTs,NoiseDensity=barometerNoiseDensity, ...
BiasInstability=barometerBiasInstability,DecayFactor=barometerDecayFactor)barometerModel =
barometerSensor with properties:
SampleRate: 0.05 Hz
ConstantBias: 0 Pa
NoiseDensity: 7.242 Pa/√Hz
BiasInstability: 247.2 Pa
DecayFactor: 1
RandomStream: 'Global stream'
Algorithms
References
[1] Sabatini, Angelo, and Vincenzo Genovese. “A Stochastic Approach to Noise Modeling for Barometric Altimeters.” Sensors 13, no. 11 (November 18, 2013): 15692–707. https://doi.org/10.3390/s131115692.
Extended Capabilities
Version History
Introduced in R2025a