Running a Grid-Connected PV Array Model in Real-Time Using Decoupling Line Blocks
This example shows how to simulate a grid-connected PV array model in real-time and how Decoupling Line blocks are used to avoid CPU overload by dividing the model into two concurrent tasks on a Speedgoat® real-time target machine.
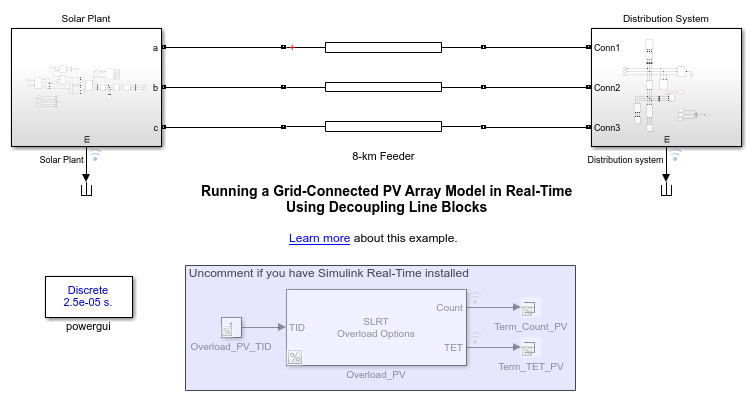
Base Model
As a base model, use a simplified version of the Running a Grid-Connected PV Array Model in Real-Time Using Decoupling Line Blocks example. This base example is available in the DecoupledPVArrayGrid.slx file:
model='DecoupledPVArrayGrid';
open_system(model);
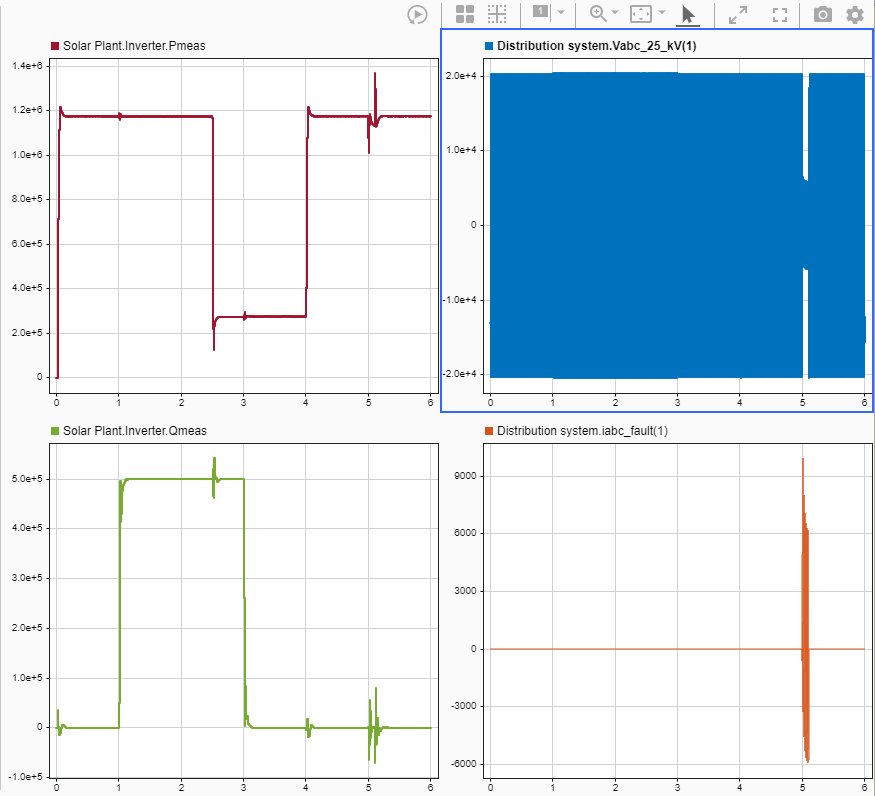
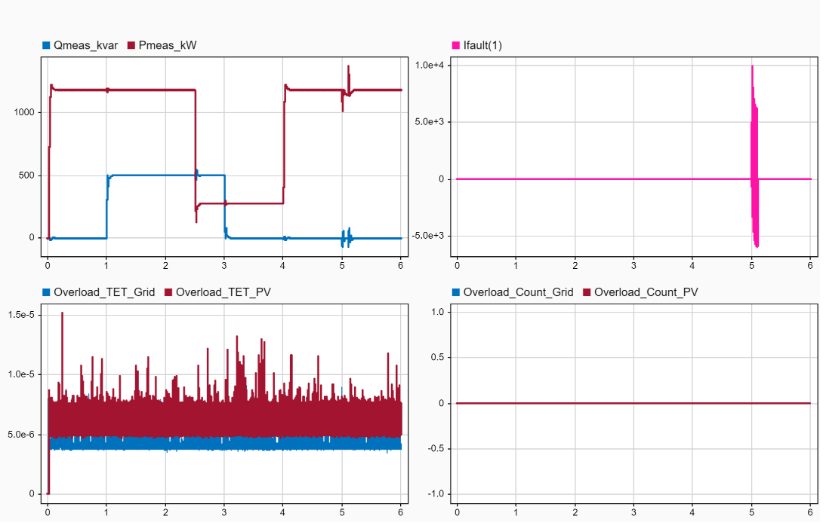
Simulate the model and observe simulation signals using the Simulink Data Inspector.
Three events are programmed in the simulation: an irradiance variation, a reactive power reference step, and a two-phase fault on the distribution system:
Run Base Model in Real-Time
This code is a summary of the settings made to the base model to run in real-time.
set_param([model,'/Overload_PV'],'TETFlag','on'); set_param([model,'/Overload_PV'],'StartupDur','1000'); set_param([model,'/Overload_PV'],'maxOverload','100000');
ph = get_param([model,'/Overload_PV'],'PortHandles'); set_param(ph.Outport(1),'DataLogging','on'); set_param(ph.Outport(1),'DataLoggingNameMode','Custom'); set_param(ph.Outport(1),'DataLoggingName','Overload_Count_PV');
ph = get_param([model,'/Overload_PV'],'PortHandles'); set_param(ph.Outport(2),'DataLogging','on'); set_param(ph.Outport(2),'DataLoggingNameMode','Custom'); set_param(ph.Outport(2),'DataLoggingName','Overload_TET_PV');
Now, assuming you have a Speedgoat target machine hardwired to your host computer, connect, build, load, and run the model on the target with these commands:
cs = getActiveConfigSet(model); switchTarget(cs,'speedgoat.tlc',[]); set_param(model,'SolverType','Fixed-step'); set_param(model,'SolverName','FixedStepDiscrete'); set_param(model,'GenCodeOnly', 'off'); set_param(model,'MaxIdLength', 95); tg=slrealtime; connect(tg); slbuild(model); load(tg,model); pause(5); tg.start;
Using the Data Inspector, see that the average execution time exceeds the model sample time (2.5e-5sec), producing a large amount of overloads that prevent the model to accurately run in real-time.
Split Base Model with Decoupling Line Blocks
To avoid CPU overloads in real-time, two Decoupling Line blocks can be used to split the model into two separate tasks that can run concurrently on the Speedgoat multi-core target.
You can use the Line Decoupler App to replace the Distributed Parameter Line block, that connects the solar plant to the distribution system, with a pair of Decoupling Line blocks. Access the App from the command line:
DecouplingLineReplace(model)
The App lists all the Distributed Parameters Line blocks in the model. Select the 8-km Feeder block in the list, and click Replace. The block is automatically replaced by a pair of Decoupling Line blocks that are tuned with the parameters of the original Distributed Parameter Line block.
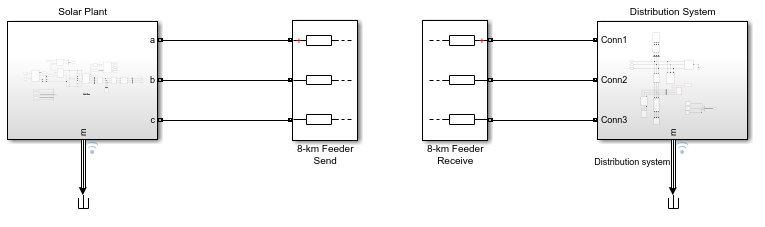
Now that there are no more electrical connections between the two ends of the line, move the 8-km Feeder Send block inside the Solar Plant subsystem, and move the 8-km Feeder Receiving block inside the Distribution System subsystem. Move the powergui block and the Overload_PV blocks into the Solar Plant subsystem and make a copy of both blocks into the Distribution System.
In the Solar Plant subsystem, check the Show send and receiving ports parameter of the Decoupling Line block. This option replace the internal Goto and From blocks with Inport r and Outport s blocks. This allow us to connect an Inport block and an Outport to the block. Remove the measurement output port. In the Distribution System, apply the same modifications. Finally, connect the two subsystems together:
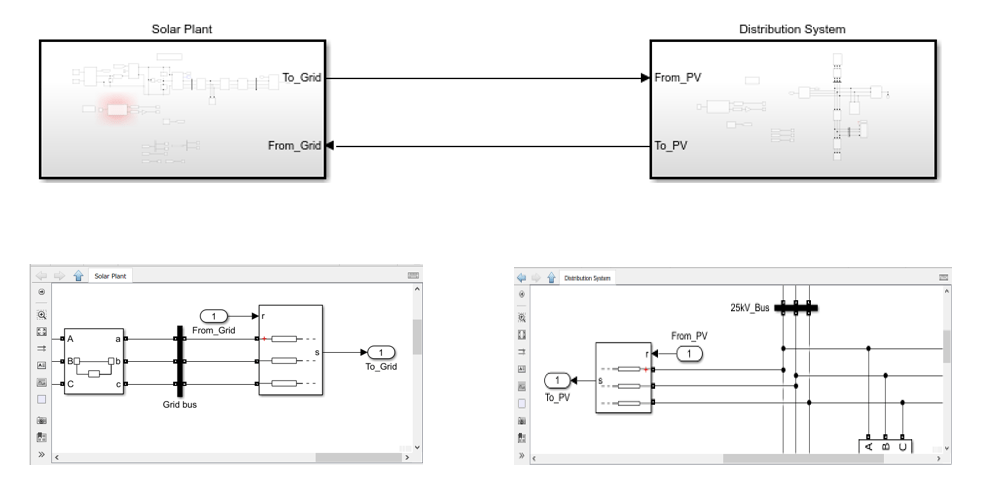
Prepare the Decoupled Model for Concurrent Execution
You must convert the Solar Plant subsystem and the Distribution System subsystem into Reference Models, specify tasks, triggers, and nodes for explicit concurrent execution of the model. For more information, see the Concurrent Execution on Simulink Real-Time documentation page.
Build, Load, and Run the Decoupled Model on the Target
Verify that the system target file is set to speedgoat.tlc in the Code Generation Configuration parameters. Now, assuming that your host computer is connected to your Speedgoat target you can build, load, and run the decoupled model in real-time:
slbuild(model)
tg=slrealtime; load(tg,model) pause(5)
tg.start
The next figure shows simulation signals in the Data Inspector. See that the average execution time no longer exceeds the model sample time (subplot on the bottom left).
By using the Decoupling Line block and a multicore target, you can run the model in real-time without CPU overload.