Induction Machine Flux Observer
Induction machine flux observer for field-oriented control

Libraries:
Simscape /
Electrical /
Control /
Observers
Description
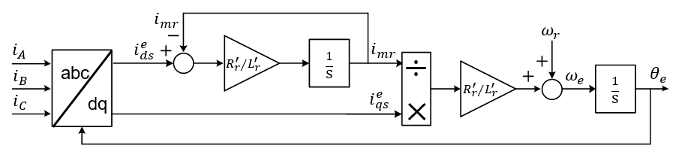
The Induction Machine Flux Observer block obtains the synchronous speed, ωe, and electrical angle, θe, that are required for performing rotor field-oriented control (FOC). The figure shows the equivalent circuit for the observer.
Equations
To determine the synchronous speed and electrical angle, the Induction Machine Flux Observer block uses these relationships:
and
in these combined forms:
and
where:
is the d-axis rotor flux.
is the magnetizing current.
and are the d-axis and q-axis stator currents.
and are the d-axis and q-axis rotor currents.
is the synchronous speed.
is the mechanical rotational speed.
is the rotor resistance, referred to the stator side.
is the rotor leakage inductance, referred to the stator side.
is the magnetizing inductance.
Examples

Three-Phase Asynchronous Drive with Sensor Control
Control and analyze the operation of an Asynchronous Machine (ASM) using sensored rotor field-oriented control. The model shows the main electrical circuit, with three additional subsystems containing the controls, measurements, and scopes. The Controls subsystem contains two controllers: one for the Grid-Side Converter (AC/DC) and one for the Machine-Side Converter (DC/AC). The Scopes subsystem contains two time scopes: one for the Grid-Side Converter and one for the ASM. When the model is executed, a Spectrum Analyzer opens and displays frequency data for the A-Phase Supply Current.
Ports
Input
Output
Parameters
References
[1] Vas, P. Electrical Machines and Drives: A Space-vector Theory Approach. New York: Oxford University Press, 1992.
Extended Capabilities
Version History
Introduced in R2017b
See Also
Blocks
- Induction Machine Current Controller | Induction Machine Direct Torque Control | Induction Machine Direct Torque Control (Single-Phase) | Induction Machine Direct Torque Control with Space Vector Modulator | Induction Machine Field-Oriented Control | Induction Machine Field-Oriented Control (Single-Phase) | Induction Machine Scalar Control