sim3d.graphics.Arrow
Description
Use the sim3d.graphics.Arrow object to create an actor object with
N number of arrow elements in the 3D environment for annotation and
visualization of relevant vector data during simulation. After you create a
sim3d.graphics.Arrow object, you can modify the aspects of the arrow actor by
setting property values.
Creation
Description
arrow = sim3d.graphics.Arrow()
arrow = sim3d.graphics.Arrow(Name=Value)Translation to [0
1 0].
Name-Value Arguments
Output Arguments
Properties
Examples
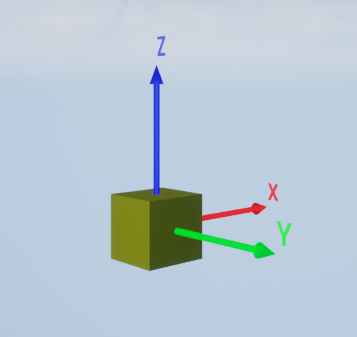
Create arrows and text labels in the 3D environment. First, create a box actor. Then, create arrows and text label objects and attach them to the actor. Finally, view the annotated actor in the Simulation 3D Viewer window.
Create 3D Environment
Create a world object using sim3d.World.
world = sim3d.World();
Create Actor
Create a box actor in the 3D environment using the sim3d.Actor object and add the box actor to the world.
box = sim3d.Actor(ActorName='Box'); createShape(box,'box',[0.5 0.5 0.5]); box.Color = [1 1 0]; add(world,box);
Create Arrows
Create three arrows using the sim3d.graphics.Arrow object and set the ActorName of the object. To position the arrows in the 3D environment, set the Translation argument with a 3-by-3 array value. Set the Rotation and Color properties for each arrow and add the object to the world.
arrows = sim3d.graphics.Arrow( ... ActorName='Arrows', ... Translation=[0.25 0 0; 0 0.25 0; 0 0 0.25]); arrows.Rotation = [0 0 0; 0 0 pi/2; 0 pi/2 0]; arrows.Color = [1 0 0; 0 1 0; 0 0 1]; add(world,arrows,box);
Create Text
Create three text labels using the sim3d.graphics.Text object and set the ActorName of the object. To position the text labels in the 3D environment, set the Translation argument with a 3-by-3 array value. Set the Color property of each text label and the String property with the display text. Add the object to the world.
texts = sim3d.graphics.Text( ... ActorName='Texts', ... Translation=[1.25 0 0; 0 1.25 0; 0 0 1.25]); texts.Color = [1 0 0; 0 1 0; 0 0 1]; texts.String = ["X";"Y";"Z"]; add(world,texts,box);
Run Simulation
Set the Simulation 3D Viewer window point of view using createViewpoint function and setView function. Run the simulation.
view = createViewpoint(world); view.Translation = [-3 4 1]; view.Rotation = [0 0 -pi/4]; setView(world,view); sampletime = 0.01; stoptime = 5; run(world,sampletime,stoptime);
delete(world);
Version History
Introduced in R2024a
See Also
sim3d.graphics.Text | sim3d.World | sim3d.Actor | add | run | Simulation 3D Actor