Discrete Derivative
Compute discrete-time derivative
Libraries:
Simulink /
Discrete
Description
The Discrete Derivative block computes an optionally scaled discrete time derivative as follows
where
and are the block input and output at the current time step, respectively.
is the block input at the previous time step.
is an optional scaling factor, specified using the Gain value parameter.
is the simulation's discrete step size, which must be fixed.
Note
Do not use this block in subsystems with a nonperiodic trigger, for example, nonperiodic function-call subsystems. This configuration produces inaccurate results.
Examples
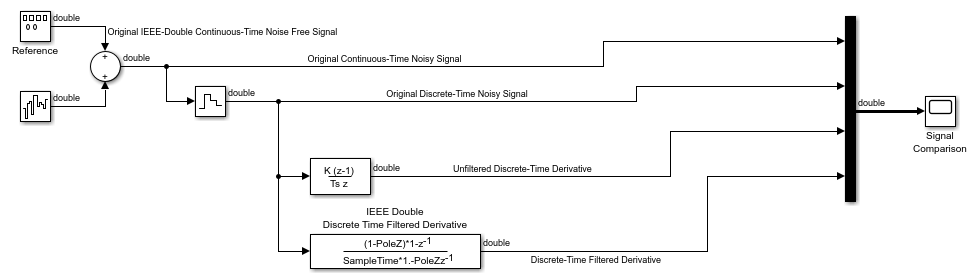
This example shows how to use the Discrete Derivative block to compute the discrete-time derivative of a floating-point input signal. The unfiltered discrete-time derivative is compared to a filtered discrete-time derivative that is computed by the Discrete Filter block.

Ports
Input
Output
Parameters
Main
Scaling factor applied to the computed derivative, specified as a real scalar value.
Programmatic Use
Block Parameter:
gainval
|
| Type: character vector |
| Values: scalar |
Default:
'1.0'
|
Initial condition for the previous scaled input, specified as a scalar.
Programmatic Use
Block Parameter:
ICPrevScaledInput
|
| Type: character vector |
| Values: scalar |
Default:
'0.0'
|
Specify whether the block performs sample- or frame-based processing:
Columns as channels (frame based)— Treat each column of the input as a separate channel (frame-based processing).Note
Frame-based processing requires a DSP System Toolbox™ license.
For more information, see Sample- and Frame-Based Concepts (DSP System Toolbox).
Elements as channels (sample based)— Treat each element of the input as a separate channel (sample-based processing).
Use Input processing to specify whether the block performs sample- or frame-based processing. For more information about these two processing modes, see Sample- and Frame-Based Concepts (DSP System Toolbox).
Programmatic Use
Block Parameter:
InputProcessing |
| Type: character vector |
Values: 'Columns as channels
(frame based)' | 'Elements as channels (sample
based)' |
Default: 'Elements as channels
(sample based)' |
Signal Attributes
Lower value of the output range that the software checks.
The software uses the minimum to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters) for some blocks.
Simulation range checking (see Specify Signal Ranges and Enable Simulation Range Checking).
Automatic scaling of fixed-point data types.
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes such as SIL or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Tips
Output minimum does not saturate or clip the actual output signal. Use the Saturation block instead.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | OutMin |
| Values: | '[]' (default) | scalar in quotes |
Upper value of the output range that the software checks.
The software uses the maximum value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters) for some blocks.
Simulation range checking (see Specify Signal Ranges and Enable Simulation Range Checking).
Automatic scaling of fixed-point data types.
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes such as SIL or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Tips
Output maximum does not saturate or clip the actual output signal. Use the Saturation block instead.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | OutMax |
| Values: | '[]' (default) | scalar in quotes |
Specify the output data type. You can set it to:
A rule that inherits a data type, for example,
Inherit: Inherit via back propagationThe name of a built-in data type, for example,
singleThe name of a data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
OutDataTypeStr
|
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'Inherit:
Inherit via back propagation' | 'double' | 'single' | 'int8'
| 'uint8' | 'int16' | 'uint16' | 'int32' | 'uint32' |
'int64' | 'uint64' | 'fixdt(1,16,0)' |
'fixdt(1,16,2^0,0)' |
Default:
'Inherit: Inherit via internal rule'
|
Select this parameter to prevent the fixed-point tools from overriding the Output data type you specify on the block. For more information, see Use Lock Output Data Type Setting (Fixed-Point Designer).
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | LockScale |
| Values: | 'off' (default) | 'on' |
Specify the rounding mode for fixed-point operations. For more information, see Rounding Modes (Fixed-Point Designer).
Block parameters always round to the nearest representable value. To control the rounding of a block parameter, enter an expression using a MATLAB® rounding function into the mask field.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | RndMeth |
| Values: | 'Floor' (default) | 'Ceiling' | 'Convergent' | 'Nearest' | 'Round' | 'Simplest' | 'Zero' |
When you select this check box, overflows saturate to the maximum or minimum value that the data type can represent. Otherwise, overflows wrap.
When you select this check box, saturation applies to every internal operation on the block, not just the output or result. In general, the code generation process can detect when overflow is not possible. In this case, the code generator does not produce saturation code.
Programmatic Use
Block Parameter:
DoSatur |
| Type: character vector |
Values:
'off' | 'on' |
Default:
'off' |
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Extended Capabilities
Version History
Introduced before R2006a