PS State-Space
Libraries:
Simscape /
Foundation Library /
Physical Signals /
Linear Operators
Description
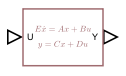
The PS State-Space block implements a state-space representation of the linear time-invariant system, defined by equations:
where:
x is the dimensionless state vector.
u is the input vector.
y is the output vector.
E is the descriptor matrix.
A is the state matrix.
B is the input matrix.
C is the output matrix.
D is the feedthrough, or direct transmission matrix.
The state-space model provides a compact and efficient way to represent and analyze systems with multiple inputs and outputs. This model is particularly useful for control design and simulation of dynamic systems.
You can define matrices in your workspace and then use these workspace variables as block parameters.
Examples
Heat Sink Using PS State-Space Block
Use the PS State-Space block to model a heat sink in air. The heat sink represents rods with distributed masses along their lengths. One end of each rod is fixed to a base and undergoes conduction. Heat conducts along the length of each rod. The length of each rod is also exposed to air and undergoes convection with the air.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2025a