Get Transform
Libraries:
ROS Toolbox /
ROS 2
Description
The Get Transform block reads the transformation value between the
specified source and target coordinate frames from the ROS 2 network. Use this block when
transformations between different frames are published by nodes on the ROS 2 network. On each
simulation step, the block checks whether a transformation is available between the specified
frames. If it is available, the block outputs a
geometry_msgs/TransformStamped non-virtual bus or a homogeneous
transformation matrix as a 4-by-4 double
matrix.
You can use the output transformation value to transform the points in source frame to
target frame using the pre-multiply convention. The block can access and listen to all frames
with dynamic transformations under tf topic as well as static
transformations under tf_static topic on the ROS 2 Network. You can also
set separate quality of service (QoS) parameters for the block when it acts as a static and
dynamic transformation listener.
Examples
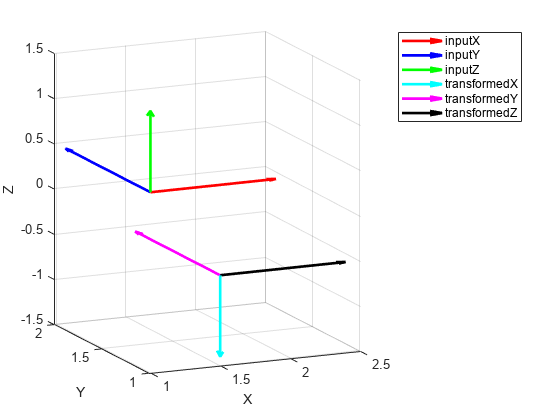
Read and Apply Transformation to ROS 2 Message in Simulink
Read transformations from ROS 2 network and use them to transform a pose message using Simulink®.
Ports
Output
Parameters
Extended Capabilities
Version History
Introduced in R2023b