ulinearize
Linearize Simulink model with Uncertain State Space block
Syntax
Description
ulin = ulinearize(mdl,io)mdl, at the operating point specified in the model,
using the analysis points specified by io. If you omit
io, then ulinearize uses the root-level input
and output ports in mdl. The function returns a uss
model object ulin that represents the uncertain model response at those
analysis points. ulin contains all the uncertain elements referenced by
Uncertain State Space blocks in the linearization path.
ulin = ulinearize(___,'StateOrder',stateorder)uss
model. Specify the state order by listing them in the cell array
stateorder. You can use this syntax with any of the previous
input-argument combinations.
ulin = ulinearize(___,options)linearizeOptions (Simulink Control Design).
Examples
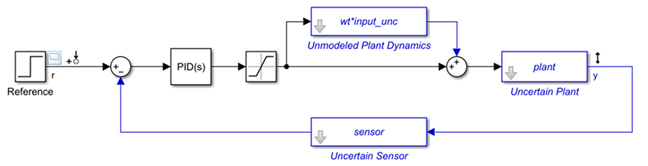
Compute an uncertain linearization of a Simulink® model containing Uncertain State Space blocks. The model rct_ulinearize_uss has three such blocks, each of which references an uncertain uss model in its Uncertain system variable parameter:
Unmodeled Plant Dynamics — references
input_uncUncertain Plant — references
plantUncertain Sensor — references
sensor
Create these uncertain uss models.
wt = makeweight(0.25,130,2.5); input_unc = ultidyn("input_unc",[1 1]); unc_pole = ureal("unc_pole",-5,"Range",[-10 -4]); plant = ss(unc_pole,5,1,0); sensor_pole = ureal("sensor_pole",-20,"Range",[-30 -10]); sensor = tf(1,[1/(-sensor_pole) 1]);
Open the model.
mdl = "rct_ulinearize_uss";
open_system(mdl)The model also contains predefined linearization analysis points, an additive input point at the signal r and an output point at the signal y. Extract these points from the model in a linearization I/O object.
io = getlinio(mdl);
Compute the uncertain linearization of the model. If you do not specify a linearization operating point, ulinearize uses the current operating point of the model.
ulin = ulinearize(mdl,io);
The resulting ulin is a uss model object representing the uncertain response of the model from r to y. The uss model contains all the uncertain variables referenced in the three Uncertain State Space blocks.
ulin
Uncertain continuous-time state-space model with 1 outputs, 1 inputs, 5 states. The model uncertainty consists of the following blocks: input_unc: Uncertain 1x1 LTI, peak gain = 1, 1 occurrences sensor_pole: Uncertain real, nominal = -20, range = [-30,-10], 1 occurrences unc_pole: Uncertain real, nominal = -5, range = [-10,-4], 1 occurrences Model Properties Type "ulin.NominalValue" to see the nominal value and "ulin.Uncertainty" to interact with the uncertain elements.
Input Arguments
Output Arguments
Version History
Introduced in R2009b
See Also
uss | ufind | usample | linearize (Simulink Control Design) | linearizeOptions (Simulink Control Design)