optimize
Description
[
optimizes the trajectory between the specified robot start and goal configurations using the
specified deep-learning-based Covariant Hamiltonian Optimization for Motion Planning (CHOMP)
algorithm, and outputs the optimized waypoints, the corresponding sample times, and solution
information.optimtraj,timesamples,solninfo] = optimize(dlchomp,start,goal)
The optimize function requires
Deep Learning Toolbox™.
Examples
Download a pretrained dlCHOMP object for the KUKA LBR iiwa 7 robot.
dataZip = matlab.internal.examples.downloadSupportFile("rst/data/dlCHOMP/R2024a/","kukaIiwa7DLCHOMPTrained.zip"); dataFilePaths = unzip(dataZip);
Load the trainedDLCHOMP MAT file. The file contains the trained DLCHOMP optimizer, obstacles, and start and goal configurations.
load trainedDLCHOMP.matWarning: Cannot load an object of class 'dlCHOMPDatastore': Its class cannot be found.
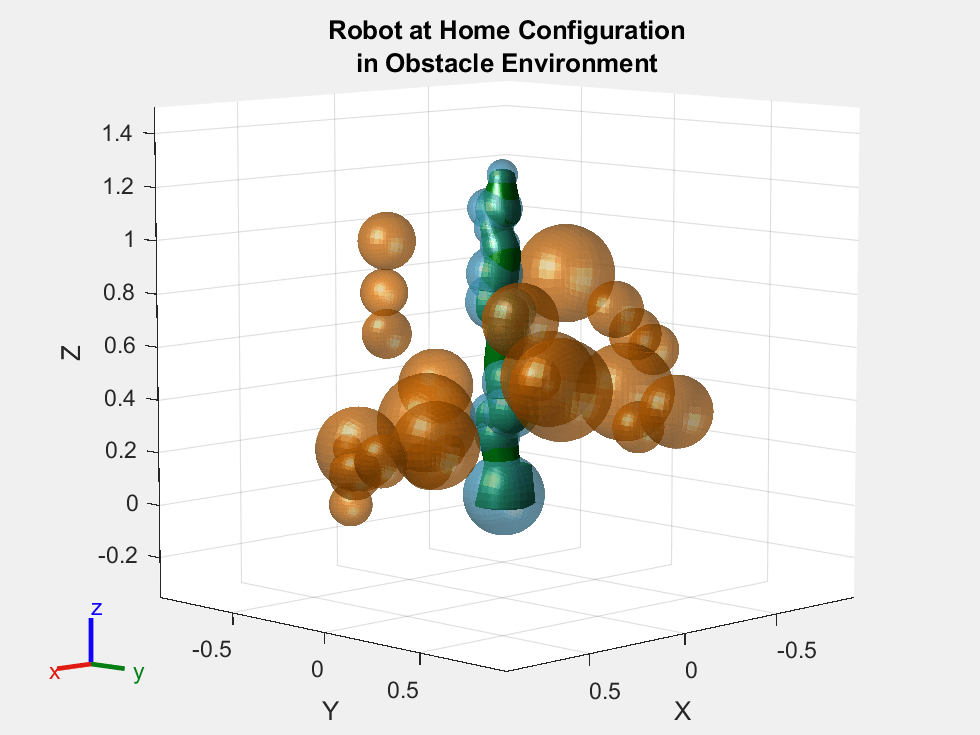
Add the obstacles to the dlCHOMP object and show the robot in the home configuration with the loaded obstacles.
trainedDLCHOMP.SphericalObstacles = unseenObstacles; show(trainedDLCHOMP); title(["Robot at Home Configuration","in Obstacle Environment"]) axis auto
Optimize trajectory between the start and goal configuration.
trainedDLCHOMP.RigidBodyTree.DataFormat = "column"trainedDLCHOMP =
dlCHOMP with properties:
RigidBodyTree: [1×1 rigidBodyTree]
RigidBodyTreeSpheres: [11×1 table]
SmoothnessOptions: [1×1 chompSmoothnessOptions]
SolverOptions: [1×1 chompSolverOptions]
CollisionOptions: [1×1 chompCollisionOptions]
SphericalObstacles: [4×24 double]
BPSEncoder: [1×1 bpsEncoder]
NumWaypoints: 40
Network: [1×1 dlnetwork]
NumInputs: [14 10000]
NumOutputs: 266
[wpts,tpts,solninfo] = optimize(trainedDLCHOMP,unseenStart,unseenGoal);
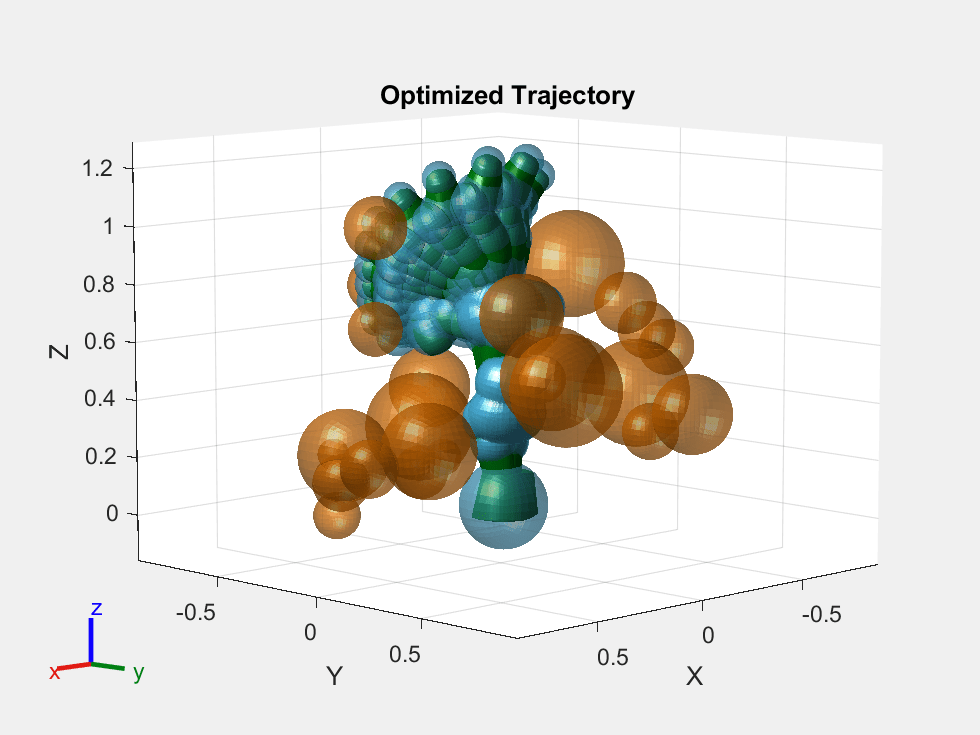
Visualize the trajectory.
figure a = show(trainedDLCHOMP,wpts); title("Optimized Trajectory") axis equal