Motion and Path Planning
Plan paths using customizable planners such as rapidly exploring random tree (RRT), and covariant Hamiltonian optimization for motion planning (CHOMP) algorithms for manipulators, and probabilistic roadmap (PRM) for mobile robots. Design customizable motion planners by leveraging Navigation Toolbox™.
Generate trajectories for smooth motion around a global path while avoiding obstacles.
Categories
- Manipulator Planning
Manipulator motion and path planning using RRT and CHOMP
- Mobile Robot Planning
Mapping, localization, path planning, path following
- Trajectory Generation
Generate polynomial, B-spline, and trapezoidal trajectories
Featured Examples

Design a Trajectory Planner for a Robotic Manipulator
Design a planner in Simulink that generates collision-free trajectories for sorting items in a bin picking system.

Pick-And-Place Workflow Using CHOMP for Manipulators
Use CHOMP to plan smooth and collision-free trajectories for a pick-and-place workflow.
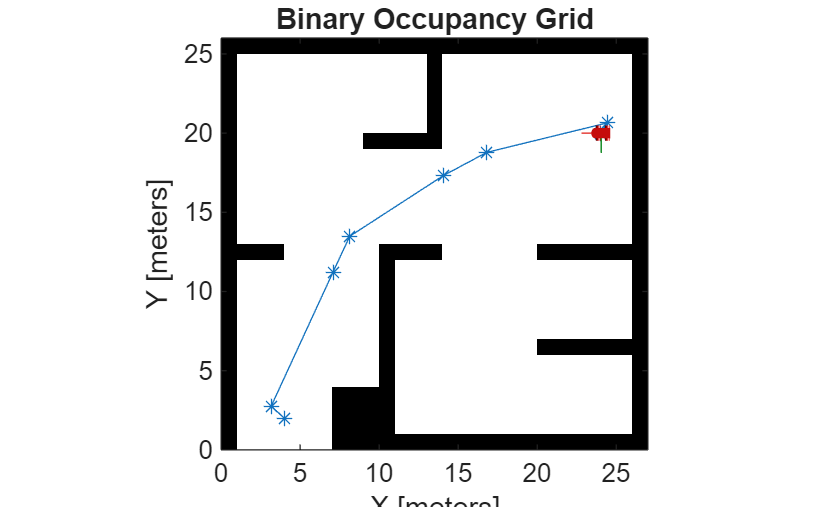
Path Following for a Differential Drive Robot
Drive a simulated robot along a predetermined path using Pure Pursuit path following controller.

Design Trajectory with Velocity Limits Using Trapezoidal Velocity Profile
Use the trapezoidal velocity profile to design a trajectory with input bounds in place of parameters.

Plan Path in Warehouse Scenario with Unseen Obstacle Avoidance
Plan path in a warehouse scenario by avoiding unseen obstacles using TEB algorithm.
Simulate Path Following on Speedgoat Real-Time Target Machine
Perform real-time simulation of path following on Speedgoat real-time target machine.
Teaching Resources

Robotic Manipulators
Learn the concepts of robot arm motion through coordinate system transformations, DH parameters, and forward/inverse kinematics.