timeresp
Time response for rational objects
Description
[
computes the time response y,t,xf] = timeresp(h,inputsignal,ts)y, sample time t of
y, and final states of the system xf. The
function calculates the time response for a rational, rfmodel.rational, or
rationalfit object h, using the time-varying input signal
inputsignal at the specified sample time
ts.
Examples
Compute Time Response with Single Input Signal
Define an input signal.
SampleTime = 2e-11;
OverSamplingFactor = 25;
TotalSampleNumber = 2^12;
InputSignal = sign(randn(1, ...
ceil(TotalSampleNumber/OverSamplingFactor)));
InputSignal = repmat(InputSignal, [OverSamplingFactor, 1]);
InputSignal = InputSignal(:);Create a rational function object.
S = sparameters('default.s2p'); s21 = rfparam(S,2,1); datafreq = S.Frequencies; fit_data = rationalfit(datafreq,s21,'Tolerance',-32);
Compute the time response with initial states set to 0.
[y,t,xf]=timeresp(fit_data,InputSignal,SampleTime);
Compute Time Response with Segmented Input Signals
Segment the input signal into two parts.
Compute the time response of the first half of the input signal segment.
[y2(1:2000,1),t21,xf2]=timeresp(fit_data,InputSignal(1:2000),SampleTime);
Use the final states of the first half of the input signal segment xf2 as the initial states to compute the time response of the second half of the input signal segment.
[y2(2001:4100,1),t22,xf2]=timeresp(fit_data,InputSignal(2001:4100),SampleTime,xf2);
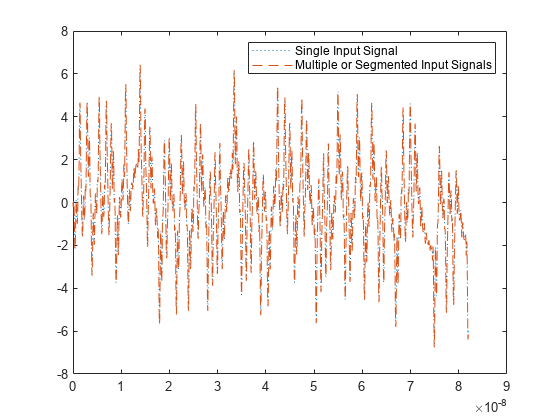
Plot Time Responses
Plot the time responses of the single and segmented input signals.
plot(t,y,':',t,y2,'--') legend({'Single Input Signal','Multiple or Segmented Input Signals'})
Input Arguments
Output Arguments
More About
Version History
Introduced in R2007aSee Also
rational | freqresp | pwlresp | rationalfit | makepassive | writeva | ispassive | rfmodel.rational