Compare Agents on Continuous Cart Pole
This example shows how to create and train frequently used default agents on a continuous action space cart-pole environment. This environment is modeled in MATLAB®, and represents a pole attached to an unactuated joint on a cart, which moves along a frictionless track. The agent can apply a force to the cart and its training goal is to balance the pole upright using minimal control effort. The example plots performance metrics such as the total training time and the total reward for each trained agent.
The results that the agents obtain in this environment, with the selected initial conditions and random number generator seed, do not necessarily imply that specific agents are better than others. Also, note that the training times depend on the computer and operating system you use to run the example, and on other processes running in the background. Your training times might differ substantially from the training times shown in the example.
Fix Random Number Stream for Reproducibility
The example code might involve computation of random numbers at several stages. Fixing the random number stream at the beginning of some sections in the example code preserves the random number sequence in the section every time you run it, which increases the likelihood of reproducing the results. For more information, see Results Reproducibility.
Fix the random number stream with seed 0 and random number algorithm Mersenne Twister. For more information on controlling the seed used for random number generation, see rng.
previousRngState = rng(0,"twister");The output previousRngState is a structure that contains information about the previous state of the stream. You will restore the state at the end of the example.
Continuous Action Space Cart Pole MATLAB Environment
For this example, the reinforcement learning environment is a pole attached to an unactuated revolutionary joint on a cart. The cart has an actuated prismatic joint connected to a one-dimensional frictionless track. The training goal in this environment is to balance the pole by applying forces (actions) to the prismatic joint.
For this environment:
The balanced, upright pole position is
0radians and the downward hanging pole position ispiradians.The pole starts upright with an initial angle between –0.05 radians and 0.05 radians.
The force action signal from the agent to the environment is from –10 N to 10 N.
The observations from the environment are the position and velocity of the cart, the pole angle (clockwise-positive), and the pole angle derivative.
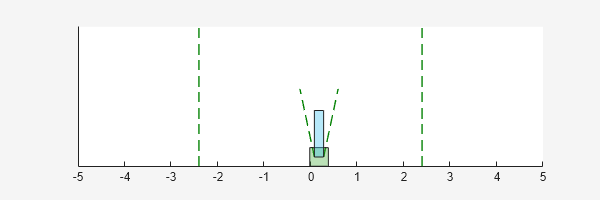
The episode terminates if the pole is more than 12 degrees from vertical or if the cart moves more than 2.4 m from the original position.
A reward of +0.5 is provided for every time-step that the pole remains upright. An additional reward is provided based on the distance between the cart and the origin. A penalty of –50 is applied when the pole falls.
For more information on this model, see Use Predefined Control System Environments.
Create Environment Object
Create a predefined environment object for the continuous cart-pole environment.
env = rlPredefinedEnv("CartPole-Continuous")env =
CartPoleContinuousAction with properties:
Gravity: 9.8000
MassCart: 1
MassPole: 0.1000
Length: 0.5000
MaxForce: 10
Ts: 0.0200
ThetaThresholdRadians: 0.2094
XThreshold: 2.4000
RewardForNotFalling: 1
PenaltyForFalling: -50
State: [4×1 double]
The environment reset function initializes (randomly) and returns the environment state (linear and angular positions and velocities).
reset(env)
ans = 4×1
0
0
0.0315
0
You can visualize the cart-pole system during training or simulation using the plot function.
plot(env)
Obtain the observation and action information for later use when creating agents.
obsInfo = getObservationInfo(env)
obsInfo =
rlNumericSpec with properties:
LowerLimit: -Inf
UpperLimit: Inf
Name: "CartPole States"
Description: "x, dx, theta, dtheta"
Dimension: [4 1]
DataType: "double"
actInfo = getActionInfo(env)
actInfo =
rlNumericSpec with properties:
LowerLimit: -10
UpperLimit: 10
Name: "CartPole Action"
Description: [0×0 string]
Dimension: [1 1]
DataType: "double"
Configure Training Options for All Agents
Set up an evaluator object to evaluate the agent 10 times without exploration every 100 training episodes.
evl = rlEvaluator(NumEpisodes=10,EvaluationFrequency=100);
Create a training options object. For this example, use the following options.
Run each training episode for a maximum of 5000 episodes, with each episode lasting a maximum of 500 time steps.
To have a better insight on the agent's behavior during training, plot the training progress (default option). If you want to achieve faster training times, set the
Plotsoption tonone.Stop the training when the average cumulative reward over the evaluation episodes is greater than 480. At this point, the agent can mostly control the position of the pole.
trainOpts = rlTrainingOptions( ... MaxEpisodes=5000, ... MaxStepsPerEpisode=500, ... StopTrainingCriteria="EvaluationStatistic", ... StopTrainingValue=480);
For more information on training options, see rlTrainingOptions.
To simulate the trained agent, create a simulation options object and configure it to simulate for 500 steps.
simOptions = rlSimulationOptions(MaxSteps=500);
For more information on simulation options, see rlSimulationOptions.
Create, Train, and Simulate a PG Agent
The actor and critic networks are initialized randomly. Ensure reproducibility of the section by fixing the seed used for random number generation.
rng(0,"twister")First, create a default rlPGAgent object using the environment specification objects.
pgAgent = rlPGAgent(obsInfo,actInfo);
Set a lower learning rate and a lower gradient threshold to promote a smoother (though possibly slower) training.
pgAgent.AgentOptions.CriticOptimizerOptions.LearnRate = 1e-3; pgAgent.AgentOptions.ActorOptimizerOptions.LearnRate = 1e-3; pgAgent.AgentOptions.CriticOptimizerOptions.GradientThreshold = 1; pgAgent.AgentOptions.ActorOptimizerOptions.GradientThreshold = 1;
Set the entropy loss weight to increase exploration.
pgAgent.AgentOptions.EntropyLossWeight = 0.005;
Train the agent, passing the agent, the environment, and the previously defined training options and evaluator objects to train. Training is a computationally intensive process that takes several minutes to complete. To save time while running this example, load a pretrained agent by setting doTraining to false. To train the agent yourself, set doTraining to true.
doTraining =false; if doTraining % To avoid plotting in training, recreate the environment. env = rlPredefinedEnv("CartPole-Continuous"); % Train the agent. Save the final agent and training results. tic pgTngRes = train(pgAgent,env,trainOpts,Evaluator=evl); pgTngTime = toc; % Extract number of training episodes and total steps. pgTngEps = pgTngRes.EpisodeIndex(end); pgTngSteps = sum(pgTngRes.TotalAgentSteps); % Uncomment to save the trained agent and the training metrics. % save("ccpBchPGAgent.mat", ... % "pgAgent","pgTngEps","pgTngSteps","pgTngTime") else % Load the pretrained agent and results for the example. load("ccpBchPGAgent.mat", ... "pgAgent","pgTngEps","pgTngSteps","pgTngTime") end
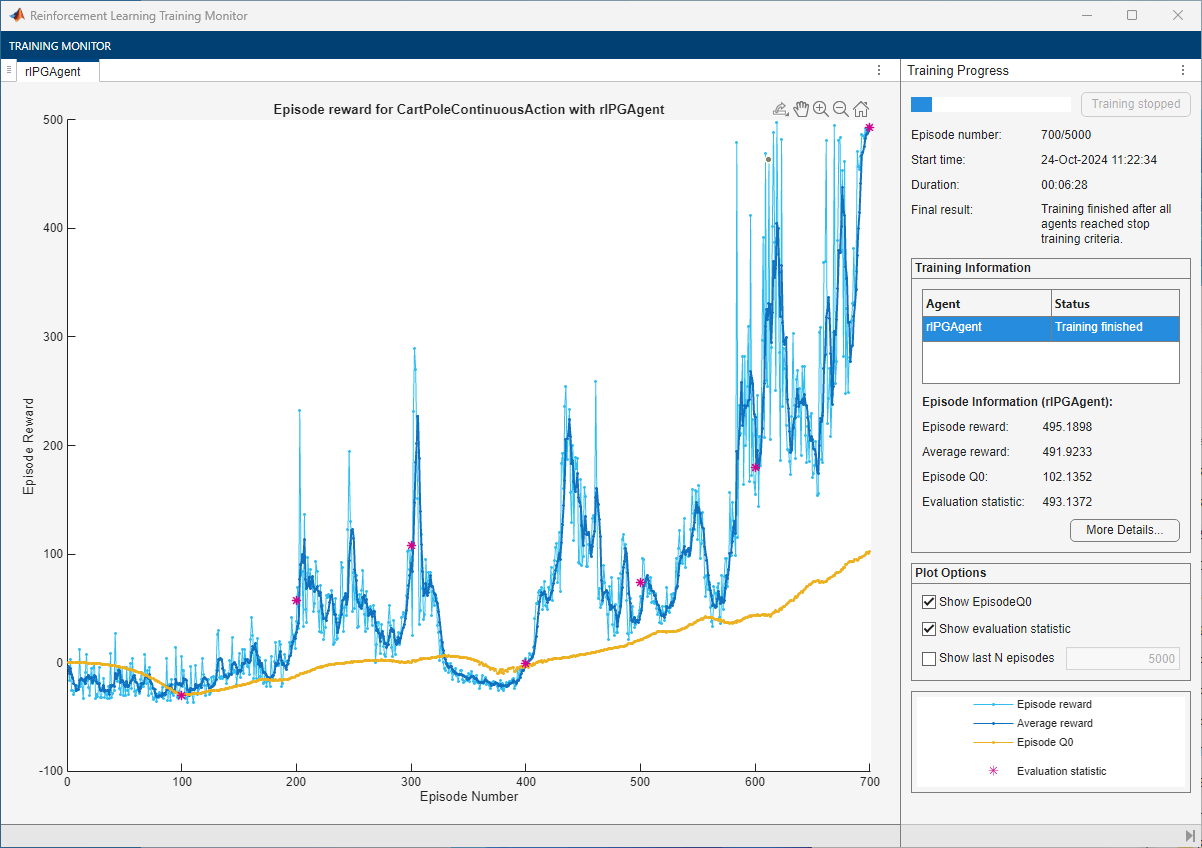
For the PG agent, the training converges to a solution after 700 episodes. You can check the trained agent within the cart-pole environment.
Ensure reproducibility of the simulation by fixing the seed used for random number generation.
rng(0,"twister")Visualize the environment.
plot(env)
By default, the agent uses a greedy (hence deterministic) policy in simulation. To use the exploratory policy instead, set the UseExplorationPolicy agent property to true.
Simulate the environment with the trained agent for 500 steps and display the total reward. For more information on agent simulation, see sim.
experience = sim(env,pgAgent,simOptions);
pgTotalRwd = sum(experience.Reward)
pgTotalRwd = 495.6761
The trained PG agent stabilizes the pole in the upright position.
Create, Train, and Simulate an AC Agent
The actor and critic networks are initialized randomly. Ensure reproducibility of the section by fixing the seed used for random number generation.
rng(0,"twister")First, create a default rlACAgent object using the environment specification objects.
acAgent = rlACAgent(obsInfo,actInfo);
Set a lower learning rate and a lower gradient threshold to promote a smoother (though possibly slower) training.
acAgent.AgentOptions.CriticOptimizerOptions.LearnRate = 1e-3; acAgent.AgentOptions.ActorOptimizerOptions.LearnRate = 1e-3; acAgent.AgentOptions.CriticOptimizerOptions.GradientThreshold = 1; acAgent.AgentOptions.ActorOptimizerOptions.GradientThreshold = 1;
Set the entropy loss weight to increase exploration.
acAgent.AgentOptions.EntropyLossWeight = 0.005;
Train the agent, passing the agent, the environment, and the previously defined training options and evaluator objects to train. Training is a computationally intensive process that takes several minutes to complete. To save time while running this example, load a pretrained agent by setting doTraining to false. To train the agent yourself, set doTraining to true.
doTraining =false; if doTraining % To avoid plotting in training, recreate the environment. env = rlPredefinedEnv("CartPole-Continuous"); % Train the agent. Save the final agent and training results. tic acTngRes = train(acAgent,env,trainOpts,Evaluator=evl); acTngTime = toc; % Extract number of training episodes and total steps. acTngEps = acTngRes.EpisodeIndex(end); acTngSteps = sum(acTngRes.TotalAgentSteps); % Uncomment to save the trained agent and the training metrics. % save("ccpBchACAgent.mat", ... % "acAgent","acTngEps","acTngSteps","acTngTime") else % Load the pretrained agent and results for the example. load("ccpBchACAgent.mat", ... "acAgent","acTngEps","acTngSteps","acTngTime") end
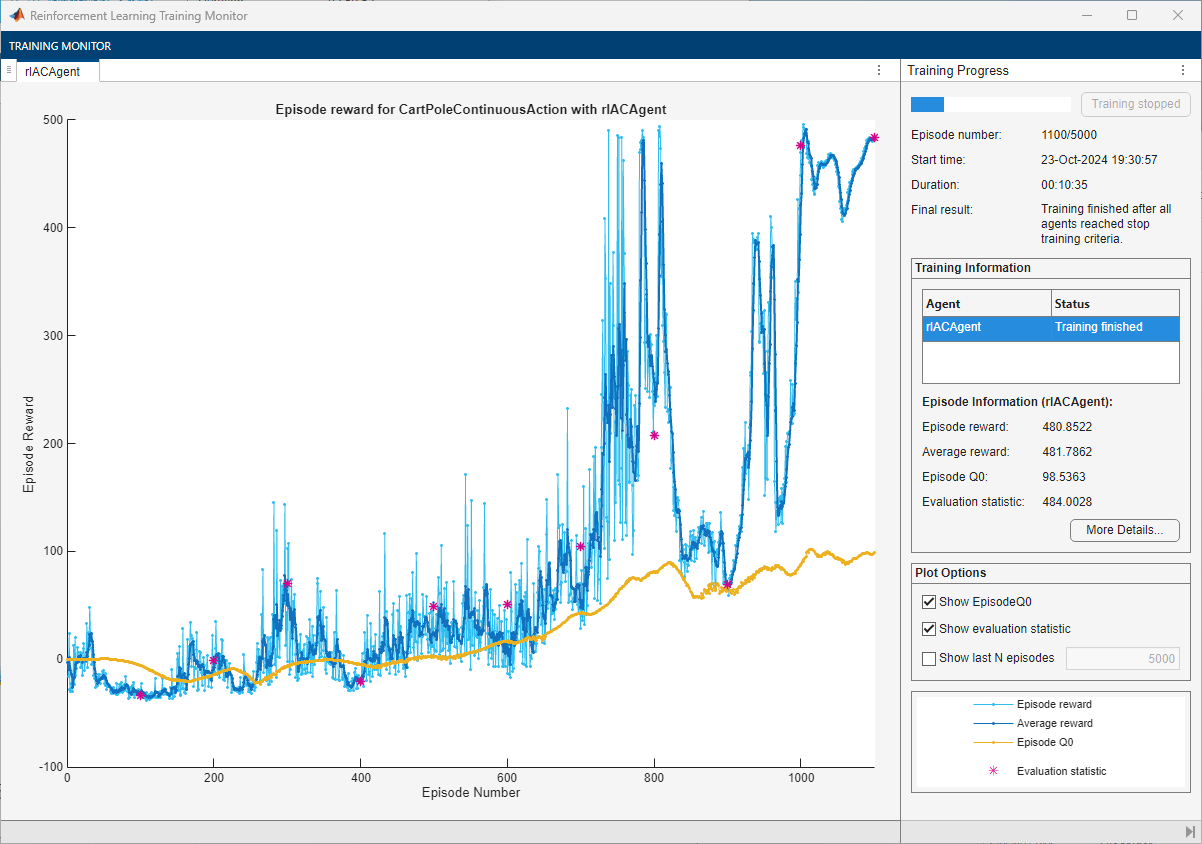
For the AC agent, the training converges to a solution after 1100 episodes. You can check the trained agent within the cart-pole environment.
Ensure reproducibility of the simulation by fixing the seed used for random number generation.
rng(0,"twister")Visualize the environment.
plot(env)
By default, the agent uses a greedy (hence deterministic) policy in simulation. To use the exploratory policy instead, set the UseExplorationPolicy agent property to true.
Simulate the environment with the trained agent for 500 steps and display the total reward. For more information on agent simulation, see sim.
experience = sim(env,acAgent,simOptions);
acTotalRwd = sum(experience.Reward)
acTotalRwd = 483.2565
The trained AC agent stabilizes the pole in the upright position.
Create, Train, and Simulate a PPO Agent
The actor and critic networks are initialized randomly. Ensure reproducibility of the section by fixing the seed used for random number generation.
rng(0,"twister")First, create a default rlPPOAgent object using the environment specification objects.
ppoAgent = rlPPOAgent(obsInfo,actInfo);
Set a lower learning rate and a lower gradient threshold to promote a smoother (though possibly slower) training.
ppoAgent.AgentOptions.CriticOptimizerOptions.LearnRate = 1e-3; ppoAgent.AgentOptions.ActorOptimizerOptions.LearnRate = 1e-3; ppoAgent.AgentOptions.CriticOptimizerOptions.GradientThreshold = 1; ppoAgent.AgentOptions.ActorOptimizerOptions.GradientThreshold = 1;
Train the agent, passing the agent, the environment, and the previously defined training options and evaluator objects to train. Training is a computationally intensive process that takes several minutes to complete. To save time while running this example, load a pretrained agent by setting doTraining to false. To train the agent yourself, set doTraining to true.
doTraining =false; if doTraining % To avoid plotting in training, recreate the environment. env = rlPredefinedEnv("CartPole-Continuous"); % Train the agent. Save the final agent and training results. tic ppoTngRes = train(ppoAgent,env,trainOpts,Evaluator=evl); ppoTngTime = toc; % Extract number of training episodes and total steps. ppoTngEps = ppoTngRes.EpisodeIndex(end); ppoTngSteps = sum(ppoTngRes.TotalAgentSteps); % Uncomment to save the trained agent and the training metrics. % save("ccpBchPPOAgent.mat", ... % "ppoAgent","ppoTngEps","ppoTngSteps","ppoTngTime") else % Load the pretrained agent and results for the example. load("ccpBchPPOAgent.mat", ... "ppoAgent","ppoTngEps","ppoTngSteps","ppoTngTime") end
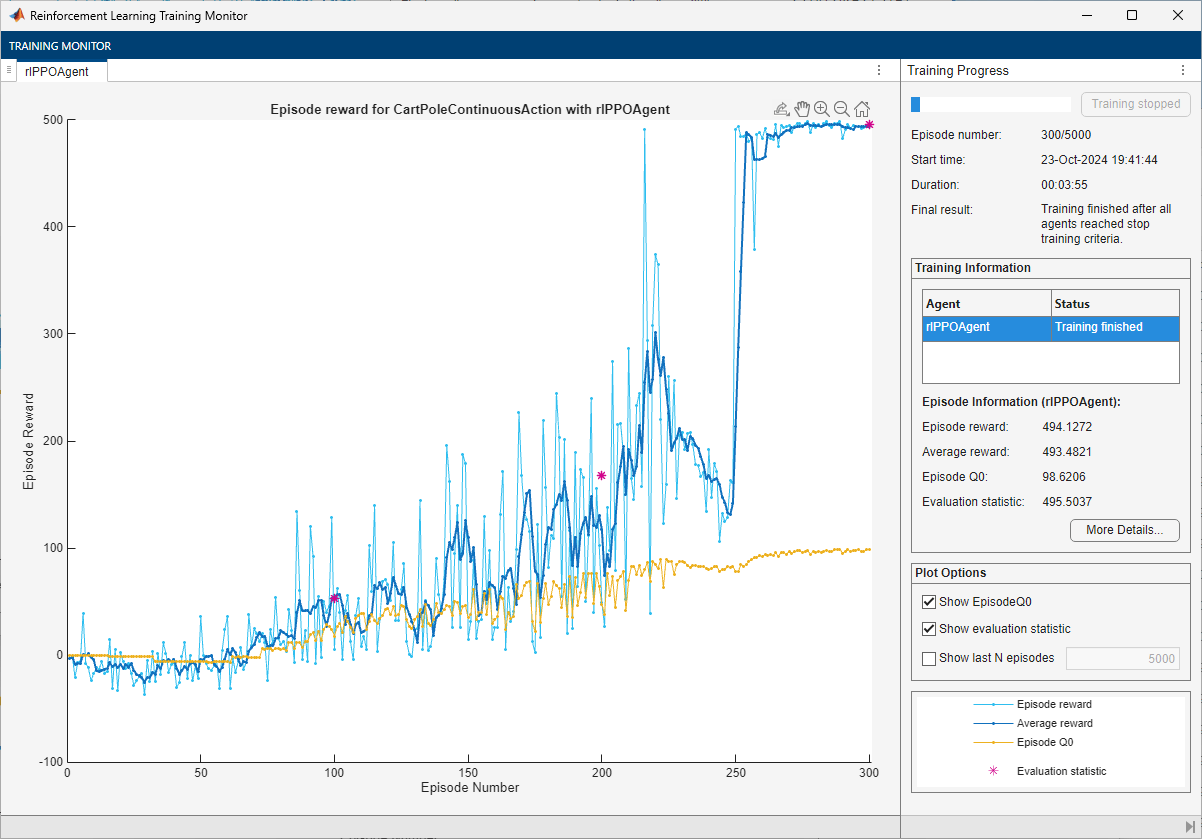
For the PPO Agent, the training converges to a solution after 300 episodes. You can check the trained agent within the cart-pole environment.
Ensure reproducibility of the simulation by fixing the seed used for random number generation.
rng(0,"twister")Visualize the environment.
plot(env)
By default, the agent uses a greedy (hence deterministic) policy in simulation. To use the exploratory policy instead, set the UseExplorationPolicy agent property to true.
Simulate the environment with the trained agent for 500 steps and display the total reward. For more information on agent simulation, see sim.
experience = sim(env,ppoAgent,simOptions);
ppoTotalRwd = sum(experience.Reward)
ppoTotalRwd = 494.6438
The trained PPO agent stabilizes the pole in the upright position.
Create, Train, and Simulate a DDPG Agent
The actor and critic networks are initialized randomly. Ensure reproducibility of the section by fixing the seed used for random number generation.
rng(0,"twister")First, create a default rlDDPGAgent object using the environment specification objects.
ddpgAgent = rlDDPGAgent(obsInfo,actInfo);
Set a lower learning rate and a lower gradient threshold to promote a smoother (though possibly slower) training.
ddpgAgent.AgentOptions.CriticOptimizerOptions.LearnRate = 1e-3; ddpgAgent.AgentOptions.ActorOptimizerOptions.LearnRate = 1e-3; ddpgAgent.AgentOptions.CriticOptimizerOptions.GradientThreshold = 1; ddpgAgent.AgentOptions.ActorOptimizerOptions.GradientThreshold = 1;
Use a larger experience buffer to store more experiences, therefore decreasing the likelihood of catastrophic forgetting.
ddpgAgent.AgentOptions.ExperienceBufferLength = 1e6;
Train the agent, passing the agent, the environment, and the previously defined training options and evaluator objects to train. Training is a computationally intensive process that takes several minutes to complete. To save time while running this example, load a pretrained agent by setting doTraining to false. To train the agent yourself, set doTraining to true.
doTraining =false; if doTraining % To avoid plotting in training, recreate the environment. env = rlPredefinedEnv("CartPole-Continuous"); % Train the agent. Save the final agent and training results. tic ddpgTngRes = train(ddpgAgent,env,trainOpts,Evaluator=evl); ddpgTngTime = toc; % Extract number of training episodes and total steps. ddpgTngEps = ddpgTngRes.EpisodeIndex(end); ddpgTngSteps = sum(ddpgTngRes.TotalAgentSteps); % Uncomment to save the trained agent and the training metrics. % save("ccpBchDDPGAgent.mat", ... % "ddpgAgent","ddpgTngEps","ddpgTngSteps","ddpgTngTime") else % Load the pretrained agent and results for the example. load("ccpBchDDPGAgent.mat", ... "ddpgAgent","ddpgTngEps","ddpgTngSteps","ddpgTngTime") end
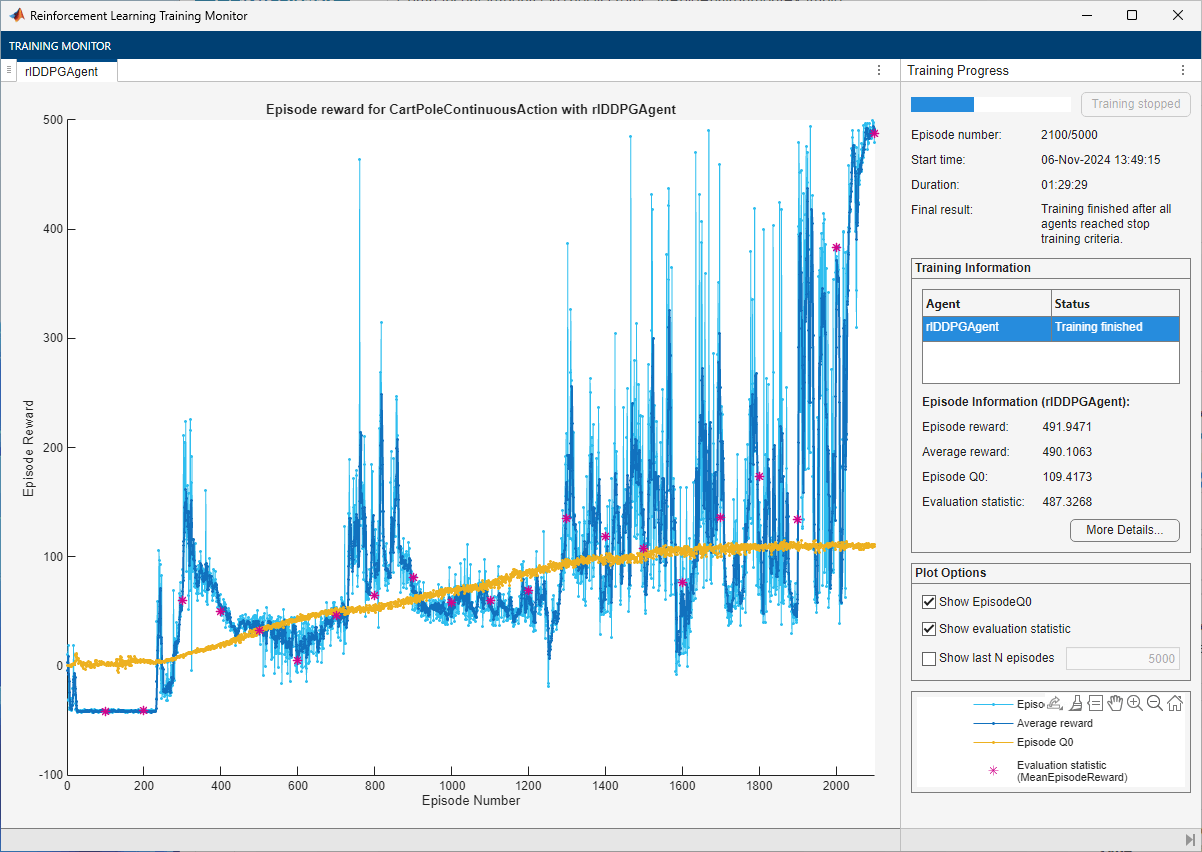
For the DDPG Agent, the training converges to a solution after 2100 episodes. You can check the trained agent within the cart-pole environment.
Ensure reproducibility of the simulation by fixing the seed used for random number generation.
rng(0,"twister")Visualize the environment.
plot(env)
By default, the agent uses a greedy (hence deterministic) policy in simulation. To use the exploratory policy instead, set the UseExplorationPolicy agent property to true.
Simulate the environment with the trained agent for 500 steps and display the total reward. For more information on agent simulation, see sim.
experience = sim(env,ddpgAgent,simOptions);
ddpgTotalRwd = sum(experience.Reward)
ddpgTotalRwd = 489.5395
The trained DDPG agent stabilizes the pole in the upright position.
Create, Train, and Simulate a TD3 Agent
The actor and critic networks are initialized randomly. Ensure reproducibility of the section by fixing the seed used for random number generation.
rng(0,"twister")First, create a default rlDDPGAgent object using the environment specification objects.
td3Agent = rlTD3Agent(obsInfo,actInfo);
Set a lower learning rate and a lower gradient threshold to promote a smoother (though possibly slower) training.
td3Agent.AgentOptions.CriticOptimizerOptions(1).LearnRate = 1e-3; td3Agent.AgentOptions.CriticOptimizerOptions(2).LearnRate = 1e-3; td3Agent.AgentOptions.ActorOptimizerOptions.LearnRate = 1e-3; td3Agent.AgentOptions.CriticOptimizerOptions(1).GradientThreshold = 1; td3Agent.AgentOptions.CriticOptimizerOptions(2).GradientThreshold = 1; td3Agent.AgentOptions.ActorOptimizerOptions.GradientThreshold = 1;
Use a larger experience buffer to store more experiences, therefore decreasing the likelihood of catastrophic forgetting.
td3Agent.AgentOptions.ExperienceBufferLength = 1e6;
Train the agent, passing the agent, the environment, and the previously defined training options and evaluator objects to train. Training is a computationally intensive process that takes several minutes to complete. To save time while running this example, load a pretrained agent by setting doTraining to false. To train the agent yourself, set doTraining to true.
doTraining =false; if doTraining % To avoid plotting in training, recreate the environment. env = rlPredefinedEnv("CartPole-Continuous"); % Train the agent. Save the final agent and training results. tic td3TngRes = train(td3Agent,env,trainOpts,Evaluator=evl); td3TngTime = toc; % Extract number of training episodes and total steps. td3TngEps = td3TngRes.EpisodeIndex(end); td3TngSteps = sum(td3TngRes.TotalAgentSteps); % Uncomment to save the trained agent and the training metrics. % save("ccpBchTD3Agent.mat", ... % "td3Agent","td3TngEps","td3TngSteps","td3TngTime") else % Load the pretrained agent and results for the example. load("ccpBchTD3Agent.mat", ... "td3Agent","td3TngEps","td3TngSteps","td3TngTime") end
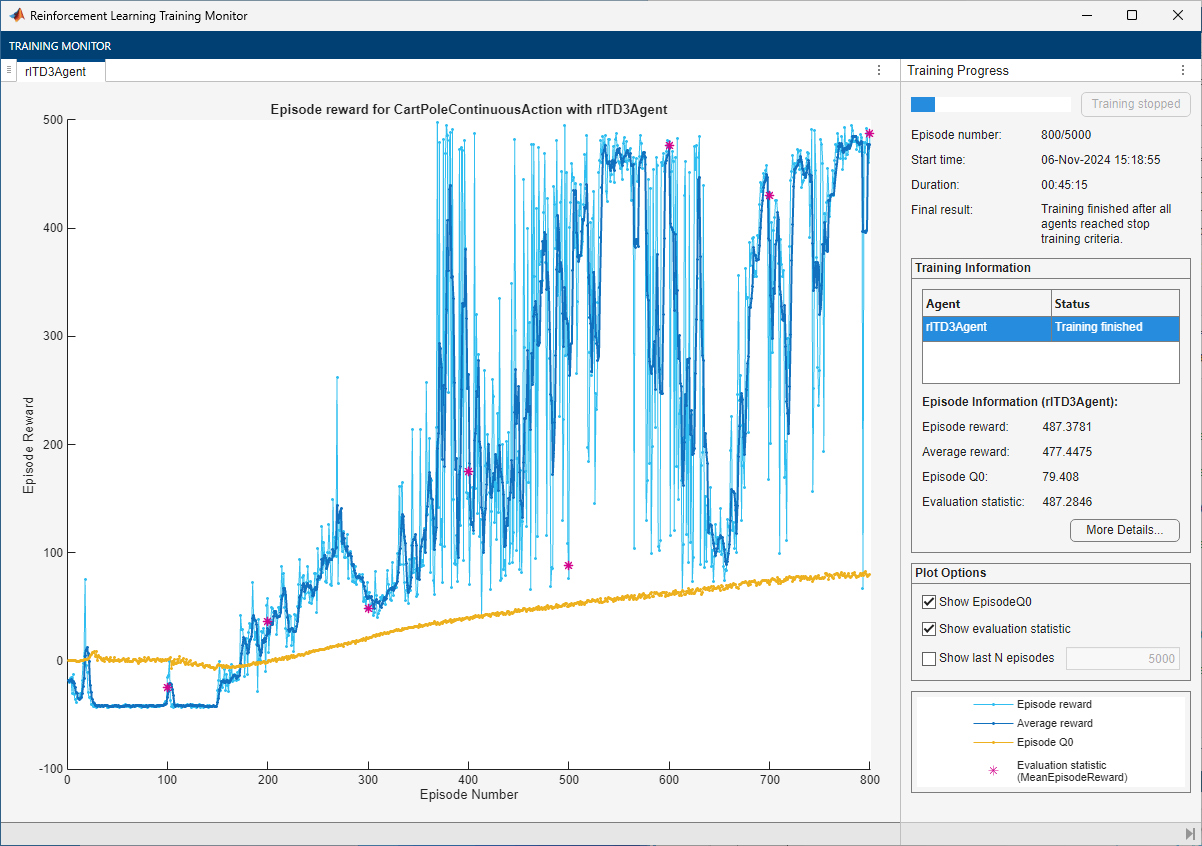
For the TD3 Agent, the training converges to a solution after 800 episodes. You can check the trained agent within the cart-pole environment.
Ensure reproducibility of the simulation by fixing the seed used for random number generation.
rng(0,"twister")Visualize the environment.
plot(env)
By default, the agent uses a greedy (hence deterministic) policy in simulation. To use the exploratory policy instead, set the UseExplorationPolicy agent property to true.
Simulate the environment with the trained agent for 500 steps and display the total reward. For more information on agent simulation, see sim.
experience = sim(env,td3Agent,simOptions);
td3TotalRwd = sum(experience.Reward)
td3TotalRwd = 486.8400
The trained TD3 agent stabilizes the pole in the upright position.
Create, Train, and Simulate a SAC Agent
The actor and critic networks are initialized randomly. Ensure reproducibility of the section by fixing the seed used for random number generation.
rng(0,"twister")First, create a default rlSACAgent object using the environment specification objects.
sacAgent = rlSACAgent(obsInfo,actInfo);
Set a lower learning rate and a lower gradient threshold to promote a smoother (though possibly slower) training.
sacAgent.AgentOptions.CriticOptimizerOptions(1).LearnRate = 1e-3; sacAgent.AgentOptions.CriticOptimizerOptions(2).LearnRate = 1e-3; sacAgent.AgentOptions.ActorOptimizerOptions.LearnRate = 1e-3; sacAgent.AgentOptions.CriticOptimizerOptions(1).GradientThreshold = 1; sacAgent.AgentOptions.CriticOptimizerOptions(2).GradientThreshold = 1; sacAgent.AgentOptions.ActorOptimizerOptions.GradientThreshold = 1;
Set the initial entropy weight and target entropy to increase exploration.
sacAgent.AgentOptions.EntropyWeightOptions.EntropyWeight = 5e-3; sacAgent.AgentOptions.EntropyWeightOptions.TargetEntropy = 5e-1;
Use a larger experience buffer to store more experiences, therefore decreasing the likelihood of catastrophic forgetting.
sacAgent.AgentOptions.ExperienceBufferLength = 1e6;
Train the agent, passing the agent, the environment, and the previously defined training options and evaluator objects to train. Training is a computationally intensive process that takes several minutes to complete. To save time while running this example, load a pretrained agent by setting doTraining to false. To train the agent yourself, set doTraining to true.
doTraining =false; if doTraining % To avoid plotting in training, recreate the environment. env = rlPredefinedEnv("CartPole-Continuous"); % Train the agent. Save the final agent and training results. tic sacTngRes = train(sacAgent,env,trainOpts,Evaluator=evl); sacTngTime = toc; % Extract number of training episodes and total steps. sacTngEps = sacTngRes.EpisodeIndex(end); sacTngSteps = sum(sacTngRes.TotalAgentSteps); % Uncomment to save the trained agent and the training metrics. % save("ccpBchSACAgent.mat", ... % "sacAgent","sacTngEps","sacTngSteps","sacTngTime") else % Load the pretrained agent and results for the example. load("ccpBchSACAgent.mat", ... "sacAgent","sacTngEps","sacTngSteps","sacTngTime") end
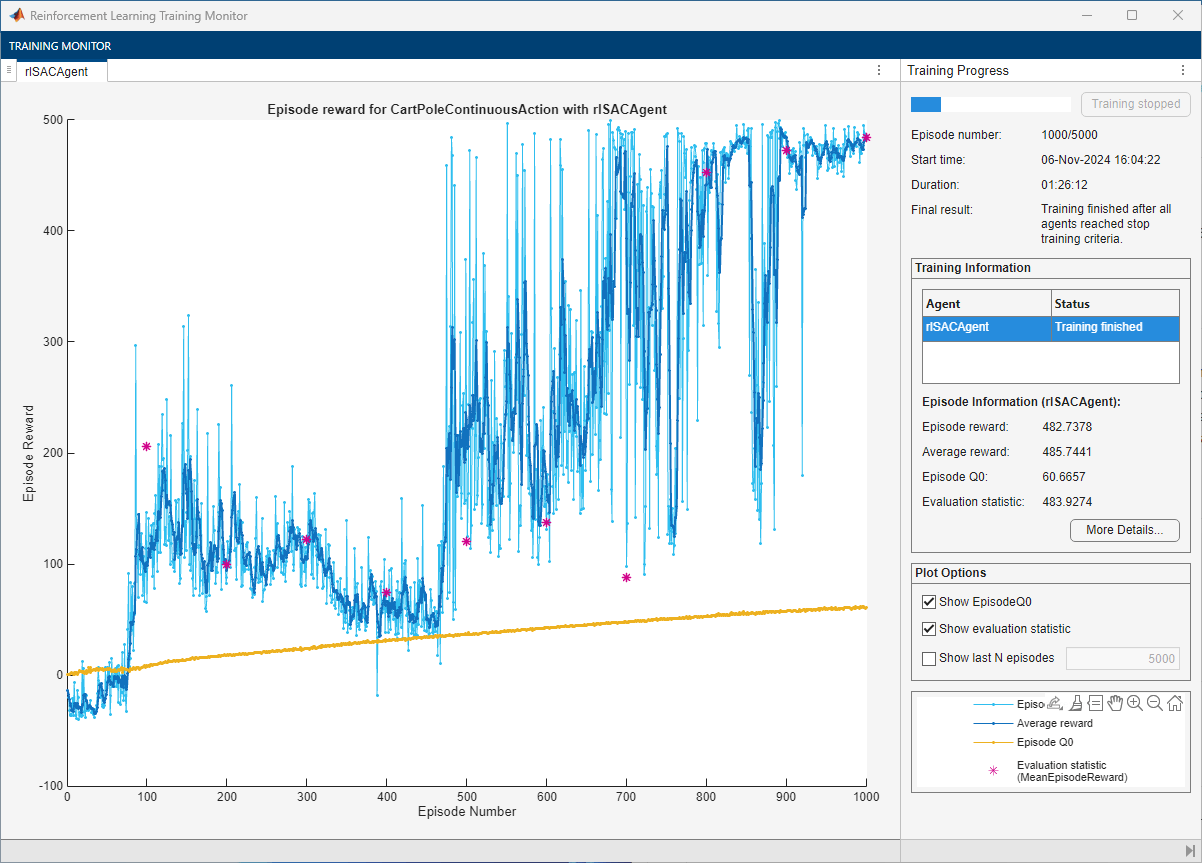
For the SAC Agent, the training converges to a solution after 800 episodes. You can check the trained agent within the cart-pole environment.
Ensure reproducibility of the simulation by fixing the seed used for random number generation.
rng(0,"twister")Visualize the environment.
plot(env)
By default, the agent uses a greedy (hence deterministic) policy in simulation. To use the exploratory policy instead, set the UseExplorationPolicy agent property to true.
Simulate the environment with the trained agent for 500 steps and display the total reward. For more information on agent simulation, see sim.
experience = sim(env,sacAgent,simOptions);
sacTotalRwd = sum(experience.Reward)
sacTotalRwd = 481.0561
The trained SAC agent stabilizes the pole in the upright position.
Plot Training and Simulation Metrics
For each agent, collect the total reward from the final simulation episode, the number of training episodes, the total number of agent steps, and the total training time as shown in the Reinforcement Learning Training Monitor.
simReward = [
pgTotalRwd
acTotalRwd
ppoTotalRwd
ddpgTotalRwd
td3TotalRwd
sacTotalRwd
];
tngEpisodes = [
pgTngEps
acTngEps
ppoTngEps
ddpgTngEps
td3TngEps
sacTngEps
];
tngSteps = [
pgTngSteps
acTngSteps
ppoTngSteps
ddpgTngSteps
td3TngSteps
sacTngSteps
];
tngTime = [
pgTngTime
acTngTime
ppoTngTime
ddpgTngTime
td3TngTime
sacTngTime
];Plot the simulation reward, number of training episodes, number of training steps (that is, the number of interactions between the agent and the environment) and the training time. Scale the data by the factor [1 5 1e6 10] for better visualization.
bar([simReward,tngEpisodes,tngSteps,tngTime]./[1 5 1e6 10]) xticklabels(["PG" "AC" "PPO" "DDPG" "TD3" "SAC"]) legend(["Simulation Reward","Training Episodes","Training Steps","Training Time"], ... "Location","northwest")
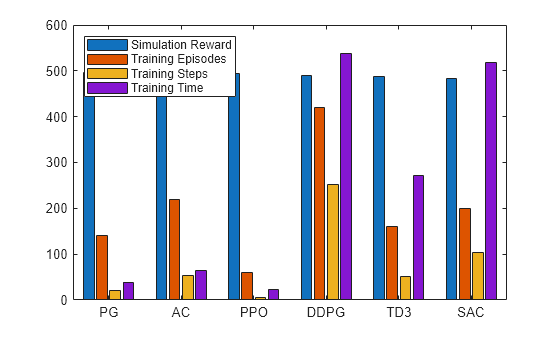
The plot shows that, for this environment, and with the used random number generator seed and initial conditions, all agents perform satisfactorily in terms of total simulation reward, with PPO using much less training time (because it is fast as a training algorithm and because it converges in just 300 episodes). DDPG takes considerably more time than PPO and AC, mostly because it needs many more training steps to converge. TD3 needs more time than AC despite taking less training steps. This happens because TD3 needs to calculate more gradients than AC. Similarly, SAC also takes almost as much time as DDPG to converge despite needing less training steps, and this also happens largely because SAC needs to calculate more gradients. With a different random seed, the initial agent networks would be different, and therefore, convergence results might be different. For more information on the relative strengths and weaknesses of each agent, see Reinforcement Learning Agents.
Save all the variables created in this example, including the training results, for later use.
% Uncomment to save all the workspace variables % save ccpAllVars.mat
Restore the random number stream using the information stored in previousRngState.
rng(previousRngState);