surfaceReflectivityLand
Description
This System object™ creates a normalized reflectivity object for a land surface. Use
surfaceReflectivityLand to generate normalized radar cross section (NRCS), and
optionally speckle, as a function of frequency and grazing angle for land surfaces. NRCS is
the radar cross section (RCS) of a unit area of a surface. Multiplying by the total area of a
surface or the illuminated area of a surface gives the total RCS.
NRCS is used to calculate RCS and surface clutter returns. Speckle is a multiplicative
factor used to make surface clutter appear noisier and is especially applicable to imaging
applications. Attach a surfaceReflectityLand object to a landSurface in
radarScenario using
SurfaceManager. See
Radar Surface Clutter Simulation for more information.
To compute the normalized reflectivity:
Create the
surfaceReflectivityLandobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
refl = surfaceReflectivityLandrefl, for a land surface. Use
refl to generate normalized radar cross section as a function of
frequency and grazing angle. This syntax creates a normalized reflectivity object with a
"Barton" land Model and a
"Flatland"
LandType.
refl = surfaceReflectivityLand(PropertyName=Value)PropertyName set to the corresponding Value.
For example, the Model and LandType properties
specify built-in reflectivity models. Land Reflectivity Models and Land Types summarizes supported
land surface models and their domain of application. You can specify additional pairs of
arguments in any order as (PropertyName1=Value1, …
,PropertyNameN=ValueN).
Properties
Usage
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
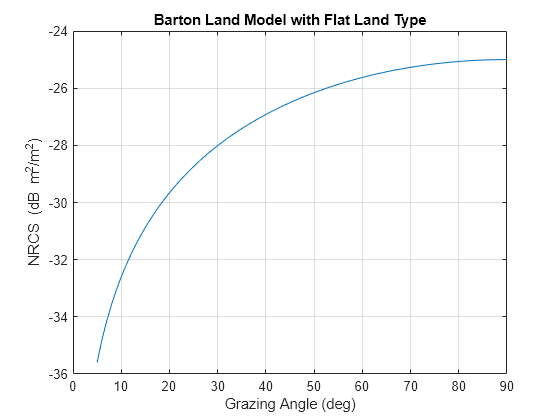
Plot the normalized radar cross-section for grazing angles from 20 to 60 degrees. Assume the default 'Barton' land Model and 'Flatland' LandType. Set the radar frequency to 1 GHz.
grazAng = 20:60; freq = 1e9; reflectivity = surfaceReflectivityLand; nrcs = reflectivity(grazAng,freq); plot(grazAng,pow2db(nrcs)) grid on xlabel('Grazing Angle (deg)') ylabel('NRCS (dB m^2/m^2)') title('Barton Land Model with Flat Land Type')
Configure a radarscenario to simulate a reflective land surface. Add a land surface object to define the physical properties of the scenario surface. The surface is a simple 200-by-200 meter rectangle. Use the surfaceReflectivityLand function to create a constant-gamma reflectivity model with a gamma value of -10 dB. Use the scenario landSurface method to add the rectangular land region and the radar reflectivity model to the scenario. Use a surface reference height of 16 meters.
scene = radarScenario(UpdateRate = 0, IsEarthCentered = false); refl = surfaceReflectivityLand(Model = "ConstantGamma", Gamma = -10); srf = landSurface(scene,RadarReflectivity = refl, ... Boundary=[-100 100; -100 100],ReferenceHeight = 16)
srf =
LandSurface with properties:
RadarReflectivity: [1×1 surfaceReflectivityLand]
ReflectionCoefficient: [1×1 radar.scenario.SurfaceReflectionCoefficient]
ReflectivityMap: 1
ReferenceHeight: 16
Boundary: [2×2 double]
Terrain: []
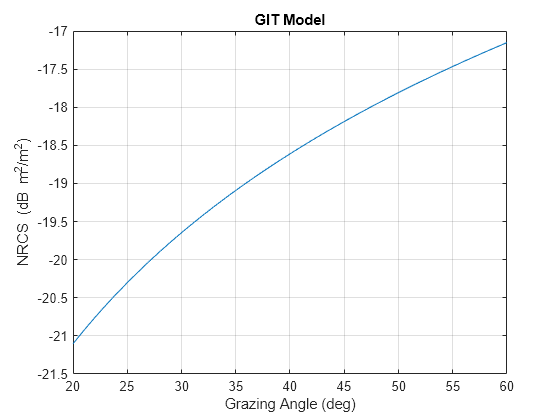
Create a normalized reflectivity object using the GIT 'Model' and a 'Soil' land type. Obtain the normalized radar cross-section at a frequency of 3 GHz over grazing angles from 20 to 60 degrees. Assume a surface height standard deviation of two meters. Plot the surface reflectivity.
grazAng = 20:60; freq = 10e9; reflectivity = surfaceReflectivityLand(Model="GIT", ... LandType="Soil",SurfaceHeightStandardDeviation=2); nrcs = reflectivity(grazAng,freq); plot(grazAng,pow2db(nrcs)) grid on xlabel('Grazing Angle (deg)') ylabel('NRCS (dB m^2/m^2)') title('GIT Model')
Create a normalized reflectivity object using the Billingsley 'Model' and a 'LowReliefRural' land type. Obtain the normalized radar cross-section at a frequency of 3 GHz over depression angles from 0.1 to 3 degrees. Plot the surface reflectivity.
depAng = 0.1:0.1:2;
freq = 3e9;
reflectivity = surfaceReflectivityLand(Model="Billingsley", ...
LandType="LowReliefRural");
nrcs = reflectivity(depAng,freq);
plot(depAng,pow2db(nrcs))
grid on
xlabel('Depression Angle (deg)')
ylabel('NRCS (dB m^2/m^2)')
title('Billingsley Model')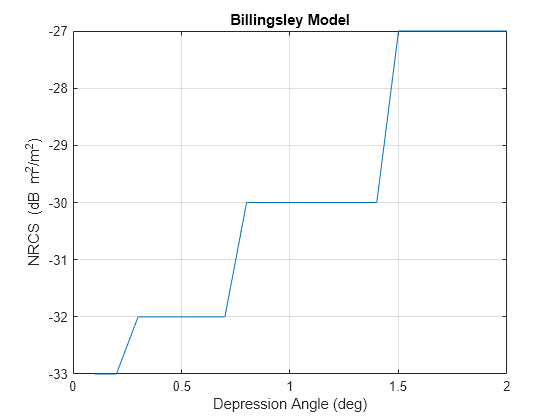
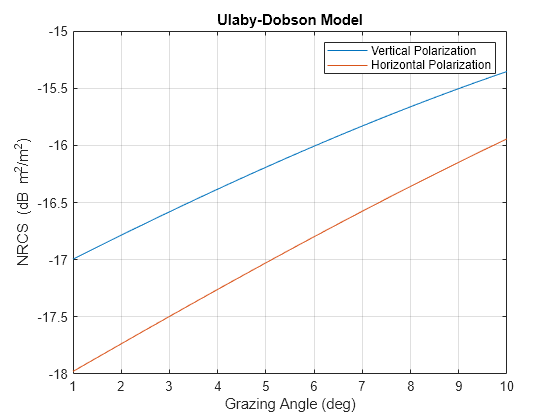
Create a normalized reflectivity object using the Ulaby-Dobson model for a grass land type. Obtain the normalized radar cross-section for both vertical and horizontal polarizations at a frequency of 10 GHz over grazing angles from 1 to 10 degrees. Plot the surface reflectivities.
grazAng = 1:0.1:10; freq = 10e9; reflectivity_v = surfaceReflectivityLand(Model="UlabyDobson", ... LandType="Grass",Polarization="V"); nrcs_v = reflectivity_v(grazAng,freq); reflectivity_h = surfaceReflectivityLand(Model="UlabyDobson", ... LandType="Grass",Polarization="H"); nrcs_h = reflectivity_h(grazAng,freq); plot(grazAng,pow2db(nrcs_v)) hold on plot(grazAng,pow2db(nrcs_h)) grid on legend('Vertical Polarization','Horizontal Polarization') xlabel('Grazing Angle (deg)') ylabel('NRCS (dB m^2/m^2)') title('Ulaby-Dobson Model')
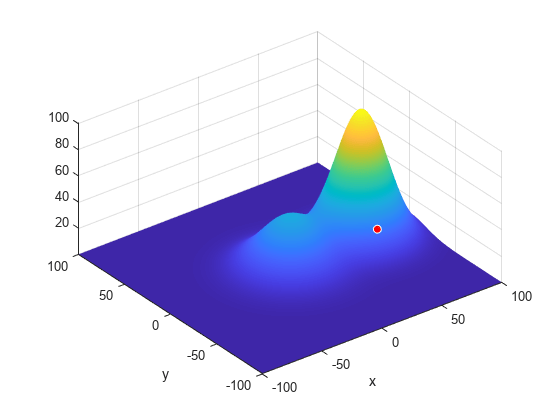
Create a surface with two hills. Plot the surface on a 200-by-200 meter grid with grid points one meter apart. Add the surface to a radar scenario. Assume the surface has a radar reflectivity defined by a constant gamma model.
[x,y] = meshgrid(linspace(-100,100,201)); ht1 = 40*exp(-(x.^2 + y.^2)/30^2); ht2 = 100*exp(-((x-60).^2 + y.^2)/25^2); ht = ht1 + ht2; p = surfc(x(1,:),y(:,1),ht); axis equal axis tight shading interp simTime = 3; scene = radarScenario(UpdateRate = 1, ... IsEarthCentered = false,StopTime = simTime); gammaDB = surfacegamma('Flatland'); refl = surfaceReflectivityLand(Model = 'ConstantGamma',Gamma = gammaDB); srf = landSurface(scene,RadarReflectivity = refl, ... Terrain = ht,Boundary = [-100,100;-100,100]);
Use surface manager to identify the surface.
scene.SurfaceManager
ans =
SurfaceManager with properties:
EnableMultipath: 0
UseOcclusion: 1
Surfaces: [1×1 radar.scenario.LandSurface]
scene.SurfaceManager.Surfaces
ans =
LandSurface with properties:
RadarReflectivity: [1×1 surfaceReflectivityLand]
ReflectionCoefficient: [1×1 radar.scenario.SurfaceReflectionCoefficient]
ReflectivityMap: 1
ReferenceHeight: 0
Boundary: [2×2 double]
Terrain: [201×201 double]
Obtain and plot the height of the surface at the point (50,-30).
xt = 50; yt = -30; htx = height(srf,[xt,yt])
htx = 21.1046
hold on plot3(xt,yt,htx+5,'ow','MarkerFaceColor','r') xlabel('x') ylabel('y') hold off
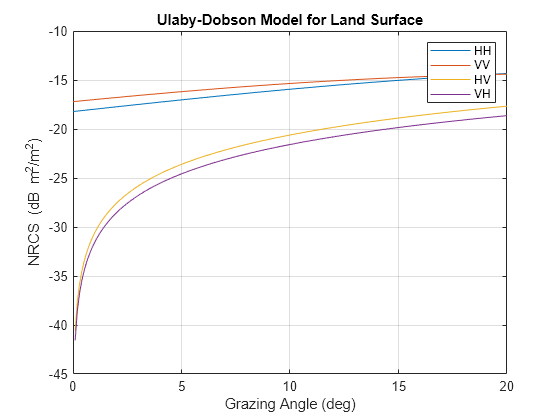
Create a land normalized reflectivity object using the Ulaby-Dobson model and a grass land type. Enable polarization and specify the cross-polarization reflectivity. Obtain the NRCS at a frequency of 10 GHz over grazing angles from 1 to 10 degrees. Plot the reflectivities.
grazAng = 0:0.1:20; freq = 10e9; surf = surfaceReflectivityLand(Model='UlabyDobson', ... LandType='Grass',EnablePolarization=true, ... GrazingAngle=0:.1:90,Frequency=[100,1e6,11e6], ... ReflectivityHV=0.05*sind(0:.1:90)'*[1 1 1], ... ReflectivityVH=0.04*sind(0:.1:90)'*[1 1 1])
surf =
surfaceReflectivityLand with properties:
EnablePolarization: 1
CrossPolarization: 'Full'
Model: 'UlabyDobson'
LandType: 'Grass'
ReflectivityHV: [901×3 double]
ReflectivityVH: [901×3 double]
Frequency: [100 1000000 11000000]
GrazingAngle: [0 0.1000 0.2000 0.3000 0.4000 0.5000 0.6000 0.7000 0.8000 0.9000 1 1.1000 1.2000 1.3000 1.4000 1.5000 1.6000 1.7000 1.8000 1.9000 2 2.1000 2.2000 2.3000 2.4000 2.5000 2.6000 2.7000 2.8000 2.9000 3 3.1000 3.2000 … ] (1×901 double)
Speckle: 'None'
nrcs = surf(grazAng,freq); plot(grazAng,pow2db(squeeze(nrcs(1,1,:))), ... grazAng,pow2db(squeeze(nrcs(2,2,:))), ... grazAng,pow2db(squeeze(nrcs(1,2,:))), ... grazAng,pow2db(squeeze(nrcs(2,1,:)))) legend('HH','VV','HV','VH'); grid on xlabel('Grazing Angle (deg)') ylabel('NRCS (dB m^2/m^2)') title('Ulaby-Dobson Model for Land Surface')
More About
References
[1] Barton, David Knox. Radar Equations for Modern Radar. Artech House, 2013.
[2] Long, Maurice W. Radar Reflectivity of Land and Sea. 3rd ed, Artech House, 2001.
[3] Nathanson, Fred E., et al. Radar Design Principles: Signal Processing and the Environment. 2. ed., Repr, Scitech Publ, 2004.
[4] Reilly, J. P., R. L. McDonald, and G. D. Dockery. "RF-Environment Models for the ADSAM Program." Report No. A1A97U-070, Laurel, MD: Johns Hopkins University Applied Physics Laboratory, August 22, 1997.
[5] Billingsley, J. Barrie. Low-Angle Radar Land Clutter: Measurements and Empirical Models. William Andrew Pub. : SciTech Pub. ; Institution of Electrical Engineers, 2002.
[6] Richards, M. A., et al., editors. Principles of Modern Radar. SciTech Pub, 2010.
[7] Morchin, Fred E., J. Patrick Reilly, and Marvin Cohen. Radar Design Principles: Signal Processing and the Environment. 2nd ed. New York: McGraw-Hill, 1991.
[8] Ulaby, Fawwaz T., and M. Craig Dobson. Handbook of Radar Scattering Statistics for Terrain. Artech House, 1989.
Extended Capabilities
Version History
Introduced in R2022a