surfacegamma
Gamma value for different terrains
Description
G = surfacegamma(TerrainType)
G = surfacegamma(TerrainType,FREQ)
surfacegamma displays several terrain types and their
corresponding γ values. These γ values are
for an operating frequency of 10 GHz.
Examples
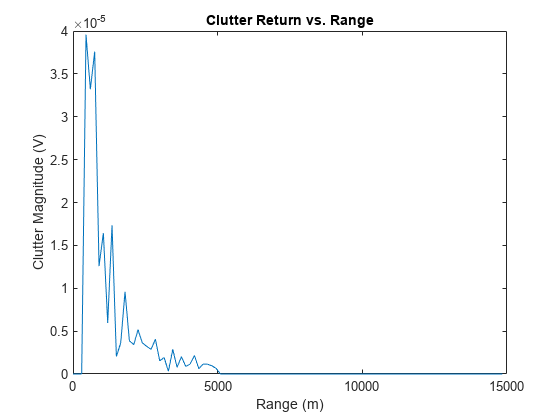
Determine the γ value for a wooded area, and then simulate the clutter return from that area. Assume the radar system uses a single cosine pattern antenna element and has an operating frequency of 300 MHz.
fc = 300e6; g = surfacegamma('woods',fc); clutter = constantGammaClutter('Gamma',g, ... 'Sensor',phased.CosineAntennaElement, ... 'OperatingFrequency',fc); x = clutter(); r = (0:numel(x)-1)/(2*clutter.SampleRate) * ... clutter.PropagationSpeed; plot(r,abs(x)) xlabel('Range (m)') ylabel('Clutter Magnitude (V)') title('Clutter Return vs. Range')
Input Arguments
Output Arguments
More About
Algorithms
The γ values for the terrain types "Sea State 3",
"Sea State 5", "Woods",
"Metropolitan", and "Rugged Mountain" are from
[2]. The γ values for the terrain types
"Farmland", "Wooded Hill", and
"Flatland" are from [3].
Measurements provide values of γ for a system operating at 10 GHz. The γ value for a system operating at frequency f is:
where γ0 is the value at frequency f0 = 10 GHz.
References
[1] Barton, David. "Land Clutter Models for Radar Design and Analysis," Proceedings of the IEEE. Vol. 73, Number 2, February, 1985, pp. 198–204.
[2] Long, Maurice W. Radar Reflectivity of Land and Sea, 3rd Ed. Boston: Artech House, 2001.
[3] Nathanson, Fred E., J. Patrick Reilly, and Marvin N. Cohen. Radar Design Principles, 2nd Ed. Mendham, NJ: SciTech Publishing, 1999.
Extended Capabilities
Version History
Introduced in R2021a