freeSpacePath
Syntax
Description
Examples
Calculate the free space propagation path for a radar transceiver configuration.
Create a radar transceiver with an isotropic antenna, transmitting a linear frequency modulated (LFM) pulse waveform with a 10 microsecond pulse width. Calculate the free space propagation paths assuming the radar is at the origin and the target is 5 km away. Return I/Q signals from the radar transceiver at the initial time and plot the results. Start by initializing the radar transceiver.
wav = phased.LinearFMWaveform(PulseWidth=1e-5); ant = phased.IsotropicAntennaElement; rdr = radarTransceiver(Waveform=wav, ... TransmitAntenna=phased.Radiator(Sensor=ant), ... ReceiveAntenna=phased.Collector(Sensor=ant), ... RangeOutputPort=true); freq = rdr.TransmitAntenna.OperatingFrequency;
Define the radar position, target position, and target velocity. Calculate the free space propagation paths. The target is located 5 km away and is moving at 20 m/s in the y-direction.
rdrPose.Position = [0 0 0]; % Radar position (m) tgtPose.Position = [0 5e3 0]; % Target position (m) tgtPose.Velocity = [0 20 0]; % Target velocity (m/s) proppaths = freeSpacePath(freq,rdrPose,tgtPose)
proppaths = struct with fields:
PathLength: 10000
PathLoss: 191.9392
ReflectionCoefficient: 11.2177
AngleOfDeparture: [2×1 double]
AngleOfArrival: [2×1 double]
DopplerShift: -40.0277
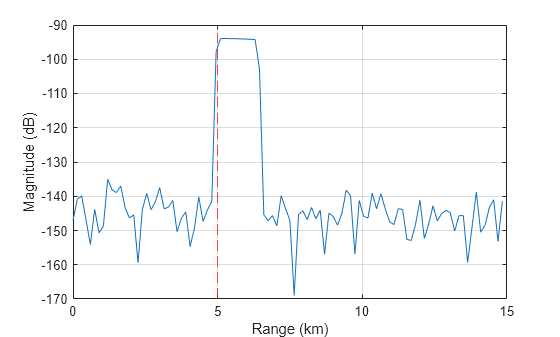
Return I/Q signals from the radarTransceiver at a time of 0 seconds and plot the results. The target is located at 5 km.
t = 0; % Time (sec) [iq,rgrid] = rdr(proppaths,t); % Plot figure plot(rgrid*1e-3,mag2db(abs(sum(iq,2)))) grid on hold on xline(5,'r--') xlabel('Range (km)') ylabel('Magnitude (dB)')
This example shows how to calculate the free space propagation path for a rotated radar transceiver configuration.
Create a radar transceiver with a directive sinc antenna with a 5 degree beamwidth. Rotate the radar to point in the direction of the target by modifying the mounting angle. Calculate the free space propagation path assuming the radar is at the origin and the target is 5 km away. The propagation paths calculated by freeSpacePath are in the radar mounting frame. Return I/Q signals from the radar transceiver at the initial time and plot the results. Start by initializing the radar transceiver.
mntAng = [90 0 0]; % Mounting angles (deg) wav = phased.LinearFMWaveform(PulseWidth=1e-5); ant = phased.IsotropicAntennaElement; rdr = radarTransceiver(Waveform=wav, ... TransmitAntenna=phased.Radiator(Sensor=ant), ... ReceiveAntenna=phased.Collector(Sensor=ant), ... RangeOutputPort=true); freq = rdr.TransmitAntenna.OperatingFrequency;
Define the radar position, target position, and target velocity. Calculate the free space propagation path in the radar mounting frame.
rdrPose.Position = [0 0 0]; % Radar position (m) tgtPose.Position = [0 5e3 0]; % Target position (m) tgtPose.Velocity = [0 20 0]; % Target velocity (m/s) proppaths = freeSpacePath(freq,rdrPose,tgtPose)
proppaths = struct with fields:
PathLength: 10000
PathLoss: 191.9392
ReflectionCoefficient: 11.2177
AngleOfDeparture: [2×1 double]
AngleOfArrival: [2×1 double]
DopplerShift: -40.0277
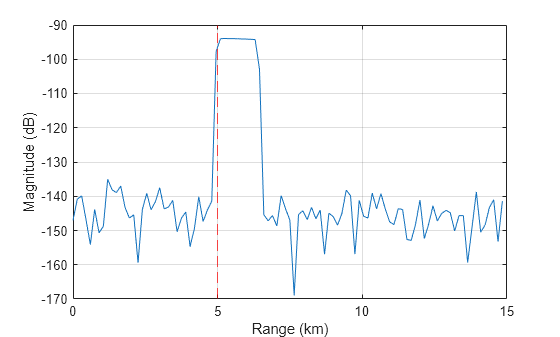
Return I/Q signals from radarTransceiver at a time of 0 seconds and plot the results. The target is located at 5 km.
t = 0; % Time (sec) [iq,rgrid] = rdr(proppaths,t); % Plot figure plot(rgrid*1e-3,mag2db(abs(sum(iq,2)))) grid on hold on xline(5,'r--') xlabel('Range (km)') ylabel('Magnitude (dB)')
Input Arguments
Name-Value Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2025a
See Also
radarTransceiver | rcsSignature | platform | platformPoses | platformProfiles | radarScenario
Topics
- Radar Coordinate Systems and Frames
- Frame Rotation (Sensor Fusion and Tracking Toolbox)