lyapunovExponent
Characterize the rate of separation of infinitesimally close trajectories
Syntax
Description
lyapExp = lyapunovExponent(X,fs)X using sampling frequency fs. Use
lyapunovExponent to characterize the rate of separation
of infinitesimally close trajectories in phase space to distinguish different
attractors. Lyapunov exponent is useful in quantifying the level of chaos in a
system, which in turn can be used to detect potential faults.
___ = lyapunovExponent(___,
estimates the Lyapunov exponent with additional options specified by one or more
Name,Value)Name,Value pair arguments.
lyapunovExponent(___) with no output
arguments creates an average logarithmic divergence versus expansion step
plot.
Use the generated interactive plot to find an appropriate
ExpansionRange.
Examples
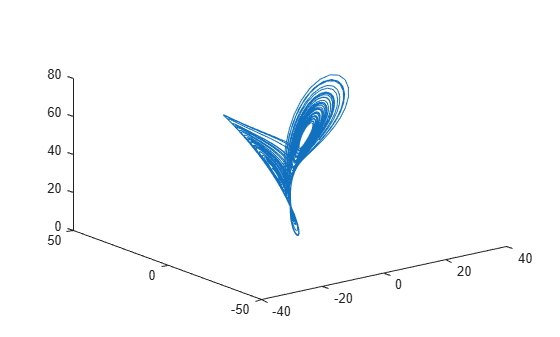
In this example, consider a Lorenz attractor describing a unique set of chaotic solutions.
Load the data set and sampling frequency fs to the workspace, and visualize the Lorenz attractor in 3-D.
load('lorenzAttractorExampleData.mat','data','fs'); plot3(data(:,1),data(:,2),data(:,3));
For this example, use the x-direction data of the Lorenz attractor. Since Lag is unknown, estimate the delay using phaseSpaceReconstruction. Set dimension to 3 since the Lorenz attractor is a three-dimensional system. The dim and lag parameters are required to create the logarithmic divergence versus expansion step plot.
xdata = data(:,1); dim = 3; [~,lag] = phaseSpaceReconstruction(xdata,[],dim)
lag = 10
Create the average logarithmic divergence versus expansion step plot for the Lorenz attractor, using the lag value obtained in the previous step. Set a sufficiently large expansion range to capture all the expansion steps.
eRange = 200;
lyapunovExponent(xdata,fs,lag,dim,'ExpansionRange',eRange)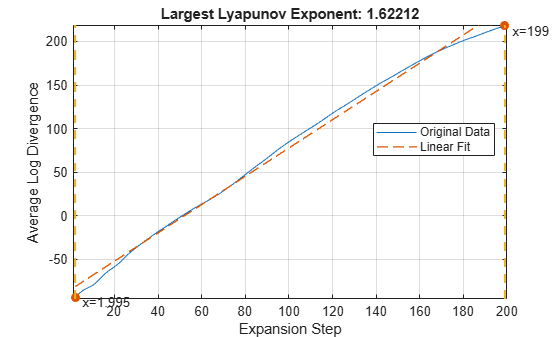
The first dashed, vertical green line (on the left) indicates the minimum number of steps used to estimate the expansion range, while the second vertical green line (on the right), represents the maximum number of steps used. Together, the first and second vertical lines represent the expansion range. The dashed red line indicates the linear fit line for the data, within the expansion range.
To compute the largest Lyapunov exponent, you first need to determine the expansion range needed for accurate estimation.
In the plot, drag the two dashed, vertical green lines to best fit the linear fit line to the original data line to obtain the expansion range: and .
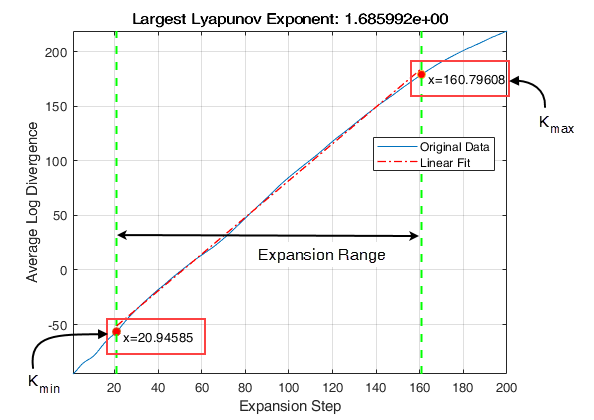
Note the new values of the expansion range after dragging the two vertical lines for an appropriate fit.
Since expansion range can only be specified using whole numbers, round-off and to the nearest integer. Find the largest Lyapunov exponent of the Lorenz attractor using the new expansion range value.
Kmin = 21;
Kmax = 161;
lyapExp = lyapunovExponent(xdata,fs,lag,dim,'ExpansionRange',[Kmin Kmax])lyapExp = 1.6834
A negative Lyapunov exponent indicates convergence, while positive Lyapunov exponents demonstrate divergence and chaos. The magnitude of lyapExp is an indicator of the rate of convergence or divergence of the infinitesimally close trajectories.
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
Lyapunov exponent is calculated in the following way:
The
lyapunovExponentfunction first generates a delayed reconstruction Y1:N with embedding dimension m, and lag τ.For a point
i, the software then finds the nearest neighbor point i* that satisfies such that , whereMinSeparation, the mean period, is the reciprocal of the mean frequency.From [1], the Lyapunov exponent for the entire expansion range is calculated as,
where, Kmin and Kmax represent
ExpansionRange,dtis the sampling time andA single value for the Lyapunov exponent is then calculated from the earlier step using the
polyfitcommand as,
References
[1] Michael T. Rosenstein , James J. Collins , Carlo J. De Luca. "A practical method for calculating largest Lyapunov exponents from small data sets ". Physica D 1993. Volume 65. Pages 117-134.
[2] Caesarendra, Wahyu & Kosasih, P & Tieu, Kiet & Moodie, Craig. "An application of nonlinear feature extraction-A case study for low speed slewing bearing condition monitoring and prognosis." IEEE/ASME International Conference on Advanced Intelligent Mechatronics: Mechatronics for Human Wellbeing, AIM 2013.1713-1718. 10.1109/AIM.2013.6584344.
[3] McCue, Leigh & W. Troesch, Armin. (2011). "Use of Lyapunov Exponents to Predict Chaotic Vessel Motions". Fluid Mechanics and its Applications. 97. 415-432. 10.1007/978-94-007-1482-3_23.
Extended Capabilities
Version History
Introduced in R2018a