decsg
Decompose constructive solid 2-D geometry into minimal regions
Description
dl = decsg(gd,sf,ns)gd into the geometry
matrix dl and returns the minimal regions that
satisfy the set formula sf. The name-space matrix ns is
a text matrix that relates the columns in gd to
variable names in sf.
Typically, you draw a geometry in the PDE Modeler app, then export it to the MATLAB® Command Window by selecting Export Geometry
Description, Set Formula, Labels from the
Draw menu in the app. The resulting geometry
description matrix gd represents the CSG model.
decsg analyzes the model and constructs a set of
disjointed minimal regions bounded by boundary segments and border segments.
This set of minimal regions constitutes the decomposed
geometry and allows other Partial Differential Equation Toolbox™ functions to work with the geometry.
Alternatively, you can use the decsg function
when creating a geometry without using the app. See 2-D Geometry Creation at Command Line for details.
To return all minimal regions (sf corresponds
to the union of all shapes in gd), use the shorter
syntax dl = decsg(gd)
Examples
Create a 2-D geometry in the PDE Modeler app, then export it to the
MATLAB workspace and decompose it to minimal regions by using
decsg.
Start the PDE Modeler app and draw a unit circle and a unit square.
pdecirc(0,0,1) pderect([0 1 0 1])
Enter C1-SQ1 in the Set formula field.
Export the geometry description matrix, set formula, and name-space matrix to the MATLAB workspace by selecting the Export Geometry Description option from the Draw menu.
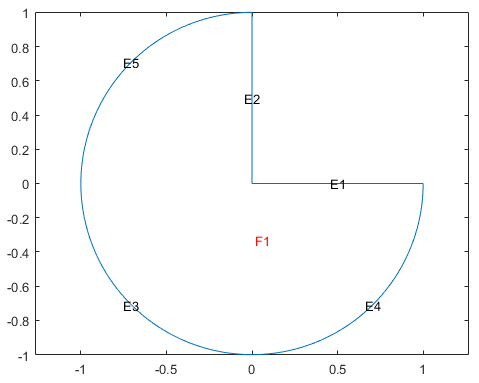
Decompose the exported geometry into minimal regions. The result is one minimal region with five edge segments: three circle edge segments and two line edge segments.
dl = decsg(gd,sf,ns)
dl =
2.0000 2.0000 1.0000 1.0000 1.0000
0 0 -1.0000 0.0000 0.0000
1.0000 0 0.0000 1.0000 -1.0000
0 1.0000 -0.0000 -1.0000 1.0000
0 0 -1.0000 0 -0.0000
0 0 1.0000 1.0000 1.0000
1.0000 1.0000 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 1.0000 1.0000 1.0000View the geometry. Display the edge labels and the face labels.
pdegplot(dl,"EdgeLabels","on","FaceLabels","on") axis equal
For comparison, decompose the same geometry without specifying
the set formula sf and the name-space matrix ns.
This syntax returns the union of all shapes in the geometry gd.
dl_all = decsg(gd)
dl_all =
2.0000 2.0000 2.0000 2.0000 1.0000 1.0000 1.0000 1.0000
0 1.0000 1.0000 0 -1.0000 0.0000 1.0000 0.0000
1.0000 1.0000 0 0 0.0000 1.0000 0.0000 -1.0000
0 0 1.0000 1.0000 -0.0000 -1.0000 0 1.0000
0 1.0000 1.0000 0 -1.0000 0 1.0000 -0.0000
3.0000 2.0000 2.0000 3.0000 1.0000 1.0000 3.0000 1.0000
1.0000 0 0 1.0000 0 0 2.0000 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
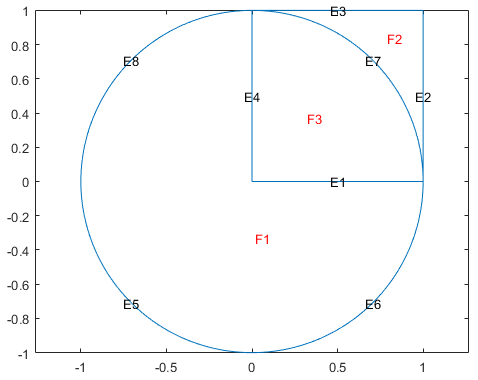
0 0 0 0 1.0000 1.0000 1.0000 1.0000View the resulting geometry.
pdegplot(dl_all,"EdgeLabels","on","FaceLabels","on") axis equal
Start the PDE Modeler app and draw a unit circle and a unit square.
pdecirc(0,0,1) pderect([0 1 0 1])
Enter C1+SQ1 in the Set formula field.
Export the Geometry Description matrix, set formula, and Name Space matrix to the MATLAB workspace by selecting the Export Geometry Description option from the Draw menu.
Decompose the exported geometry into minimal regions.
Because the geometry is a union of all regions, C1+SQ1,
you can omit the arguments specifying the set formula and name-space
matrix when using decsg.
[dl,bt] = decsg(gd)
dl =
2.0000 2.0000 2.0000 2.0000 1.0000 1.0000 1.0000 1.0000
0 1.0000 1.0000 0 -1.0000 0.0000 1.0000 0.0000
1.0000 1.0000 0 0 0.0000 1.0000 0.0000 -1.0000
0 0 1.0000 1.0000 -0.0000 -1.0000 0 1.0000
0 1.0000 1.0000 0 -1.0000 0 1.0000 -0.0000
3.0000 2.0000 2.0000 3.0000 1.0000 1.0000 3.0000 1.0000
1.0000 0 0 1.0000 0 0 2.0000 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 1.0000 1.0000 1.0000 1.0000
bt =
1 0
0 1
1 1View the geometry. Display the edge labels and the face labels.
pdegplot(dl,"EdgeLabels","on","FaceLabels","on") axis equal
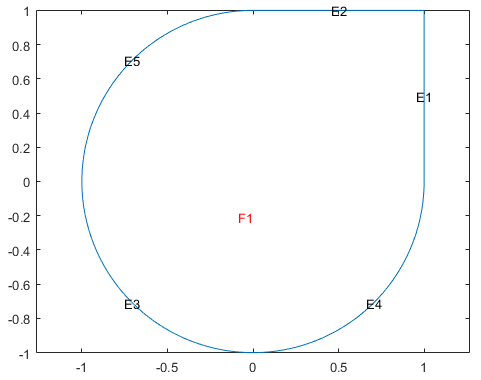
Remove the subdomain boundaries by using the csgdel function.
[dl2,bt2] = csgdel(dl,bt);
View the resulting geometry.
figure pdegplot(dl2,"EdgeLabels","on","FaceLabels","on") axis equal
Input Arguments
Output Arguments
Limitations
In rare cases
decsgcan error or create an invalid geometry because of the limitations of its algorithm. Such issues can occur when two or more edges of a geometry partially overlap, almost coincide, or are almost tangent.
Tips
All shapes must be unique. When checking uniqueness, ellipses with equal semiaxes ignore rotation, and polygons ignore the order of their points.
All radii and semiaxis lengths must be positive.
Polygons must not be self-intersecting or self-overlapping.
Each polygon must be defined with a set of distinct points. Individual polygons cannot reuse points, but different polygons can share points.
decsgerrors if it cannot evaluate the set formulasf.
Version History
Introduced before R2006aSee Also
geometryFromEdges | csgdel | wgeom | pdecirc | pdeellip | pdepoly | pderect | PDE
Modeler