optimizePoseGraph
Optimize nodes in pose graph
Syntax
Description
The optimizePoseGraph function optimizes the poses within a
pose graph such that they comply with the edge constraints as much as
possible.
This pose graph optimization assumes all edge constraints and loop closures are valid.
To consider trimming edges based on bad loop closures, see the trimLoopClosures function.
Note
Computer Vision Toolbox™ is required if the pose graph is represented as a digraph object. Use the createPoseGraph object
function of imageviewset (Computer Vision Toolbox) or pcviewset (Computer Vision Toolbox) to create the digraph object of the
required format, where node estimates are represented by
rigidtform3d and edge constraints are represented by either
rigidtform3d or simtform3d. If digraph edge
information matrix is not supplied, it is assumed to be identity by default.
This comparison chart shows the corresponding pose format for the different representations of pose graph:
| Pose Graph Representations | Pose Formats |
|---|---|
poseGraph object | Poses are 3-element row vectors of the form [x, y,
yaw]. |
poseGraph3D object | Poses are seven-element row vectors of the form[x, y, z, qw,
qx, qy, qz]. Note the sequence in the quaternion part.
|
digraph object | Poses are rigidtform3d (Image Processing Toolbox) or simtform3d (Image Processing Toolbox) objects. This representation requires
Computer Vision Toolbox. |
updatedGraph = optimizePoseGraph(poseGraph)
updatedGraph = optimizePoseGraph(poseGraph,solver)
[
returns additional statistics about the optimization process in
updatedGraph,solutionInfo] = optimizePoseGraph(___)solutionInfo using any of the previous syntaxes.
[___] = optimizePoseGraph(___,
specifies additional options using one or more Name,Value)Name,Value pairs.
For example, 'MaxIterations',1000 increases the maximum number of
iterations to 1000.
Examples
Optimize a pose graph based on the nodes and edge constraints. The pose graph used in this example is taken from the MIT Dataset and was generated using information extracted from a parking garage.
Load the pose graph from the MIT dataset. Inspect the poseGraph3D object to view the number of nodes and loop closures.
load parking-garage-posegraph.mat pg disp(pg);
poseGraph3D with properties:
NumNodes: 1661
NumEdges: 6275
NumLoopClosureEdges: 4615
LoopClosureEdgeIDs: [128 129 130 132 133 134 135 137 138 139 140 142 143 144 146 147 148 150 151 204 205 207 208 209 211 212 213 215 216 217 218 220 221 222 223 225 226 227 228 230 231 232 233 235 236 237 238 240 241 242 243 244 … ] (1×4615 double)
LandmarkNodeIDs: [1×0 double]
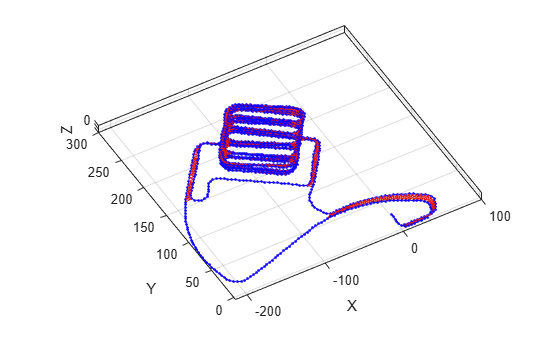
Plot the pose graph with IDs off. Red lines indicate loop closures identified in the dataset.
title('Original Pose Graph') show(pg,'IDs','off'); view(-30,45)
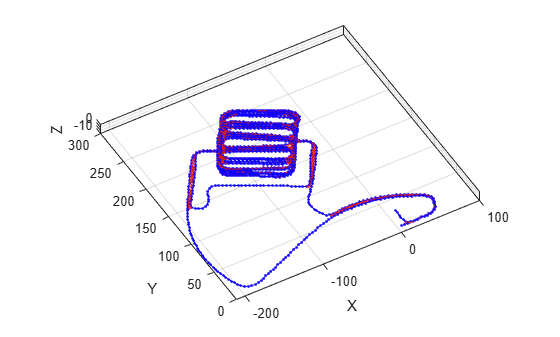
Optimize the pose graph. Nodes are adjusted based on the edge constraints and loop closures. Plot the optimized pose graph to see the adjustment of the nodes with loop closures.
updatedPG = optimizePoseGraph(pg); figure title('Updated Pose Graph') show(updatedPG,'IDs','off'); view(-30,45)
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Grisetti, G., R. Kummerle, C. Stachniss, and W. Burgard. "A Tutorial on Graph-Based SLAM." IEEE Intelligent Transportation Systems Magazine. Vol. 2, No. 4, 2010, pp. 31–43. doi:10.1109/mits.2010.939925.
[2] Carlone, Luca, Roberto Tron, Kostas Daniilidis, and Frank Dellaert. "Initialization Techniques for 3D SLAM: a Survey on Rotation Estimation and its Use in Pose Graph Optimization." 2015 IEEE International Conference on Robotics and Automation (ICRA). 2015, pp. 4597–4604.
Extended Capabilities
Version History
Introduced in R2019b
See Also
Functions
trimLoopClosures|addRelativePose|removeEdges|edgeNodePairs|edgeConstraints|findEdgeID|nodeEstimates