How the Software Computes Nonlinear ARX Model Output
This topic describes how the software evaluates the output of nonlinearity estimators and uses this output to compute the response of a nonlinear ARX model.
Evaluating Nonlinearities
Evaluating the predicted output of a nonlinearity for a specific regressor value x requires that you first extract the nonlinearity F and regressors from the model:
F = m.OutputFcn; x = getreg(m,'all',data) % computes regressors
Evaluate F(x):
y = evaluate(F,x)
where x is a row vector of regressor values.
You can also evaluate predicted output values at multiple time instants by evaluating F for several regressor vectors simultaneously:
y = evaluate(F,[x1;x2;x3])
Simulation and Prediction of Sigmoid Network
This example shows how the software computes the simulated and predicted output of a nonlinear ARX model as a result of evaluating the output of its nonlinearity estimator for given regressor values.
Estimate nonlinear ARX model with sigmoid network nonlinearity.
load twotankdata estData = iddata(y,u,0.2,'Tstart',0); M = nlarx(estData,[1 1 0],'idSigmoidNetwork');
Explore Nonlinear ARX Model
Inspect the model properties and estimation result.
present(M)
M =
Nonlinear ARX model with 1 output and 1 input
Inputs: u1
Outputs: y1
Regressors:
Linear regressors in variables y1, u1
List of all regressors
Output function: Sigmoid network with 10 units
Sample time: 0.2 seconds
Status:
Termination condition: Maximum number of iterations reached..
Number of iterations: 20, Number of function evaluations: 243
Estimated using NLARX on time domain data "estData".
Fit to estimation data: 96.31% (prediction focus)
FPE: 4.804e-05, MSE: 4.666e-05
More information in model's "Report" property.
Model Properties
This command provides information about input and output variables, regressors, and nonlinearity estimator.
Inspect the nonlinearity estimator.
NL = M.OutputFcn;
class(NL) % nonlinearity classans = 'idSigmoidNetwork'
NL
NL =
Sigmoid Network
Inputs: y1(t-1), u1(t)
Output: y1(t)
Nonlinear Function: Sigmoid network with 10 units
Linear Function: initialized to [-0.161 -0.105]
Output Offset: initialized to 0.00119
NonlinearFcn: 'Sigmoid units and their parameters'
LinearFcn: 'Linear function parameters'
Offset: 'Offset parameters'
Inspect the sigmoid network parameter values.
NL.Parameters;
Predict Output
The model output is:
y1(t)= f(y1(t-1),u1(t))
where f is the sigmoid network function. The model regressors y1(t-1) and u1(t) are inputs to the nonlinearity estimator. Time t is a discrete variable representing kT , where k = 0, 1, ... , and T is the sampling interval. In this example, T=0.2 second.
The output prediction equation is:
yp(t)=f(y1_meas(t-1),u1_meas(t))
where yp(t) is the predicted value of the response at time t. y1_meas(t-1) and u1_meas(t) are the measured output and input values at times t-1 and t, respectively.
Computing the predicted response includes:
Computing regressor values from input-output data.
Evaluating the nonlinearity for given regressor values.
Specify zero initial states.
x0 = 0;
The model has one state because there is only one delayed term y1(t-1). The number of states is equal to sum(getDelayInfo(M)).
Compute the predicted output at time t=0.
RegValue = [0,estData.u(1)]; % input to nonlinear function f
yp_0 = evaluate(NL,RegValue);RegValue is the vector of regressors at t=0. The predicted output is yp(t=0)=f(y1_meas(t=-1),u1_meas(t=0)). In terms of MATLAB® variables, this output is f(0,estData.u(1)), where
y1_meas(t=0) is the measured output value at
t=0, which is toestData.y(1).u1_meas(t =1) is the second input data sample
estData.u(2).
Perform one-step-ahead prediction at all time values for which data is available.
RegMat = getreg(M,[],estData,x0); yp = evaluate(NL,RegMat.Variables);
This code obtains a matrix of regressors RegMat for all the time samples using getreg. RegMat has as many rows as there are time samples, and as many columns as there are regressors in the model - two, in this example.
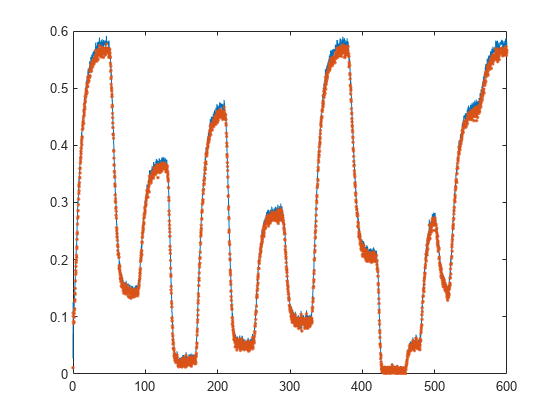
These steps are equivalent to the predicted response computed in a single step using predict:
yp_direct = predict(M,estData,1,'InitialState',x0); % compare t = estData.SamplingInstants; plot(t,yp, t,yp_direct.OutputData,'.')
Simulate Output
The model output is:
y1(t)=f(y1(t-1),u1(t))
where f is the sigmoid network function. The model regressors y1(t-1) and u1(t) are inputs to the nonlinearity estimator. Time t is a discrete variable representing kT , where k= 0, 1,.., and T is the sampling interval. In this example, T=0.2 second.
The simulated output is:
ys(t) = f(ys(t-1),u1_meas(t))
where ys(t) is the simulated value of the response at time t. The simulation equation is the same as the prediction equation, except that the past output value ys(t-1) results from the simulation at the previous time step, rather than the measured output value.
Computing the simulated response includes:
Computing regressor values from input-output data using simulated output values.
Evaluating the nonlinearity for given regressor values.
Specify zero initial states.
x0 = 0;
The model has one state because there is only one delayed term y1(t-1). The number of states is equal to sum(getDelayInfo(M)).
Compute the simulated output at time t =0, ys(t=0).
RegValue = [0,estData.u(1)]; ys_0 = evaluate(NL,RegValue);
RegValue is the vector of regressors at t=0. ys(t=0)=f(y1(t=-1),u1_meas(t=0)). In terms of MATLAB variables, this output is f(0,estData.u(1)), where
y1(t=-1) is the initial state
x0 (=0).u1_meas(t=0) is the value of the input at t =0, which is the first input data sample
estData.u(1).
Compute the simulated output at time t=1, ys(t=1).
RegValue = [ys_0,estData.u(2)]; ys_1 = evaluate(NL,RegValue);
The simulated output ys(t=1)=f(ys(t=0),u1_meas(t=1)). In terms of MATLAB variables, this output is f(ys_0,estData.u(2)), where
ys(t=0) is the simulated value of the output at t=0.
u1_meas(t=1) is the second input data sample estData.u(2).
Compute the simulated output at time t=2.
RegValue = [ys_1,estData.u(3)]; ys_2 = evaluate(NL,RegValue);
Unlike for output prediction, you cannot use getreg to compute regressor values for all time values. You must compute regressors values at each time sample separately because the output samples required for forming the regressor vector are available iteratively, one sample at a time.
These steps are equivalent to the simulated response computed in a single step using sim(idnlarx).
ys = sim(M,estData,x0);
Perform Low-Level Computation
Perform a low-level computation of the nonlinearity response for the idSigmoidNetwork function:
where f is the sigmoid function, given by the following equation:
In F(x), the input to the sigmoid function is x-r. x is the regressor value and r is regressor mean, computed from the estimation data. , , and are the network parameters stored in the model property M.nl.par, where M is an idnlarx object.
Compute the output value at time t=1, when the regressor values are x=[estData.y(1),estData.u(2)]:
Assign values to the parameters in the expression for F(x).
x = [estData.y(1),estData.u(2)]; % regressor values at t=1 r = NL.Input.Mean; P = NL.LinearFcn.InputProjection; L = NL.LinearFcn.Value'; d = NL.Offset.Value; Q = NL.NonlinearFcn.Parameters.InputProjection; aVec = NL.NonlinearFcn.Parameters.OutputCoefficient; % [a_1; a_2; ...] cVec = NL.NonlinearFcn.Parameters.Translation; % [c_1; c_2; ...] bMat = NL.NonlinearFcn.Parameters.Dilation; % [b_1; b_2; ...]
Compute the linear portion of the response (plus offset).
yLinear = (x-r)*P*L+d;
Compute the nonlinear portion of the response.
f = @(z)1/(exp(-z)+1); % anonymous function for sigmoid unit yNonlinear = 0; for k = 1:length(aVec) fInput = (x-r)*Q* bMat(:,k)+cVec(k); yNonlinear = yNonlinear+aVec(k)*f(fInput); end