Estimate Nonlinear ARX Models Initialized Using Linear ARX Models
This example shows how to estimate nonlinear ARX models by using linear ARX models.
Load the estimation data.
load throttledata.matThis command loads the data object ThrottleData into the workspace. The object contains input and output samples collected from an engine throttle system, sampled at a rate of 100 Hz.
A DC motor controls the opening angle of the butterfly valve in the throttle system. A step signal (in volts) drives the DC motor. The output is the angular position (in degrees) of the valve.
Plot the data to view and analyze the data characteristics.
plot(ThrottleData)
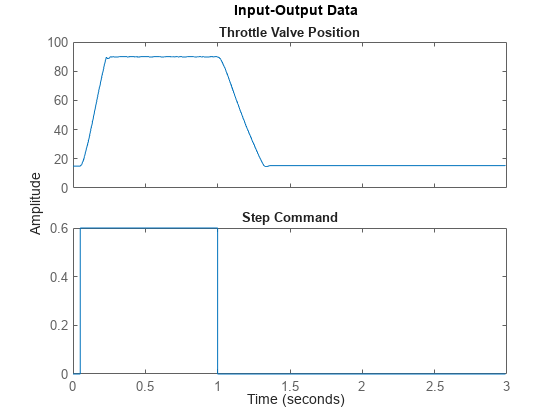
In the normal operating range of 15-90 degrees, the input and output variables have a linear relationship. You use a linear model of low order to model this relationship.
In the throttle system, a hard stop limits the valve position to 90 degrees, and a spring brings the valve to 15 degrees when the DC motor is turned off. These physical components introduce nonlinearities that a linear model cannot capture.
Estimate an ARX model to model the linear behavior of this single-input single-output system in the normal operating range.
Detrend the data because linear models cannot capture offsets.
Tr = getTrend(ThrottleData); Tr.OutputOffset = 15; DetrendedData = detrend(ThrottleData,Tr);
Estimate a linear ARX model with na=2, nb=1, nk=1.
opt = arxOptions('Focus','simulation'); LinearModel = arx(DetrendedData,[2 1 1],opt);
Compare the simulated model response with the estimation data.
compare(DetrendedData, LinearModel)
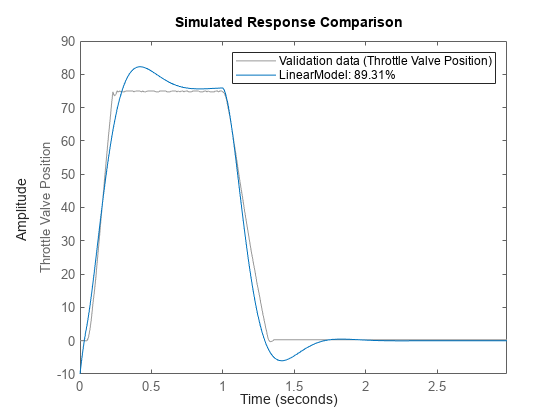
The linear model captures the rising and settling behavior in the linear operating range but does not account for output saturation at 90 degrees.
Estimate a nonlinear ARX model to model the output saturation.
optNL = nlarxOptions('Focus','simulation'); NonlinearModel = nlarx(ThrottleData,LinearModel,'idSigmoidNetwork',optNL);
The software uses the orders and delay of the linear model for the orders of the nonlinear model. In addition, the software computes the linear function of the idSigmoidNetwork nonlinearity estimator.
Compare the nonlinear model with the estimation data.
compare(ThrottleData, NonlinearModel)
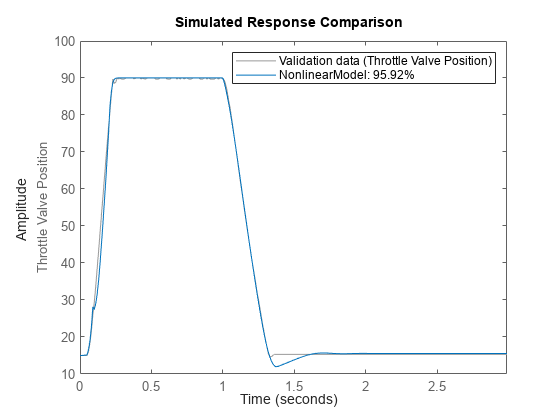
The model captures the nonlinear effects (output saturation) and improves the overall fit to data.