insEKF
Description
The insEKF object creates a continuous-discrete extended
Kalman Filter (EKF), in which the state prediction uses a continuous-time model and the state
correction uses a discrete-time model. The filter uses data from inertial sensors to estimate
platform states such as position, velocity, and orientation. The toolbox provides a few sensor
models, such as insAccelerometer, insGyroscope, insGPS, and insMagnetometer, that you can
use to enable the corresponding measurements in the EKF. You can also customize your own
sensor models by inheriting from the positioning.INSSensorModel interface class. The toolbox also provides motion
models, such as insMotionOrientation and
insMotionPose, that you can
use to enable the corresponding state propagation in the EKF. You can also customize your own
motion models by inheriting from the positioning.INSMotionModel interface class.
Creation
Syntax
Description
filter = insEKFinsEKF filter object with default property values. With the default
settings, the filter can estimate orientation by fusing accelerometer and gyroscope data.
filter = insEKF(sensor1,sensor2,...,sensorN)Sensors
property.
filter = insEKF(___,motionModel)MotionModel
property.
filter = insEKF(___,options)insOptions object
options.
Properties
Object Functions
predict | Predict state estimates forward in time for insEKF |
fuse | Fuse sensor data for state estimation in insEKF |
residual | Residual and residual covariance from state measurement for
insEKF |
correct | Correct state estimates in insEKF using direct state
measurements |
stateparts | Get and set part of state vector in insEKF |
statecovparts | Get and set part of state covariance matrix in
insEKF |
stateinfo | State vector information for insEKF |
estimateStates | Batch fusion and smoothing of sensor data |
tune | Tune insEKF parameters to reduce estimation error |
createTunerCostTemplate | Create template of tuner cost function |
tunerCostFcnParam | First parameter example for tuning cost function |
copy | Create copy of insEKF |
reset | Reset states for insEKF |
Examples
Create a default insEKF object. By default, the filter fuses the measurement data from an accelerometer and a gyroscope assuming orientation-only motion.
filter1 = insEKF
filter1 =
insEKF with properties:
State: [13×1 double]
StateCovariance: [13×13 double]
AdditiveProcessNoise: [13×13 double]
MotionModel: [1×1 insMotionOrientation]
Sensors: {[1×1 insAccelerometer] [1×1 insGyroscope]}
SensorNames: {'Accelerometer' 'Gyroscope'}
ReferenceFrame: 'NED'
Create a second insEKF object that fuses data from an accelerometer, a gyroscope, and a magnetometer, as well as models both rotational motion and translational motion.
filter2 = insEKF(insAccelerometer,insGyroscope,insMagnetometer,insMotionPose)
filter2 =
insEKF with properties:
State: [28×1 double]
StateCovariance: [28×28 double]
AdditiveProcessNoise: [28×28 double]
MotionModel: [1×1 insMotionPose]
Sensors: {[1×1 insAccelerometer] [1×1 insGyroscope] [1×1 insMagnetometer]}
SensorNames: {'Accelerometer' 'Gyroscope' 'Magnetometer'}
ReferenceFrame: 'NED'
Create a third insEKF object that fuses data from a gyroscope and a GPS. Specify the reference frame of the filter as the east-north-up (ENU) frame. Note that the motion model that the filter uses is the insMotionPose object because a GPS measures platform positions.
option = insOptions(ReferenceFrame="ENU");
filter3 = insEKF(insGyroscope,insGPS,option)filter3 =
insEKF with properties:
State: [19×1 double]
StateCovariance: [19×19 double]
AdditiveProcessNoise: [19×19 double]
MotionModel: [1×1 insMotionPose]
Sensors: {[1×1 insGyroscope] [1×1 insGPS]}
SensorNames: {'Gyroscope' 'GPS'}
ReferenceFrame: 'ENU'
Load measurement data from an accelerometer and a gyroscope.
load("accelGyroINSEKFData.mat");Create an insEKF filter object. Specify the orientation part of the state in the filter using the initial orientation from the measurement data. Specify the diagonal elements of the state estimate error covariance matrix corresponding to the orientation state as 0.01.
accel = insAccelerometer; gyro = insGyroscope; filt = insEKF(accel,gyro); stateparts(filt,"Orientation",compact(initOrient)); statecovparts(filt,"Orientation",1e-2);
Specify the measurement noise and the additive process noise. You can obtain these values by using the tune object function of the filter object.
accNoise = 0.1739; gyroNoise = 1.1129; processNoise = diag([ ... 2.8586 1.3718 0.8956 3.2148 4.3574 2.5411 3.2148 0.5465 0.2811 ... 1.7149 0.1739 0.7752 0.1739]); filt.AdditiveProcessNoise = processNoise;
Sequentially fuse the measurement data using the predict and fuse object functions of the filter object.
N = size(sensorData,1); estOrient = quaternion.zeros(N,1); dt = seconds(diff(sensorData.Properties.RowTimes)); for ii = 1:N if ii ~= 1 % Step forward in time. predict(filt,dt(ii-1)); end % Fuse accelerometer data. fuse(filt,accel,sensorData.Accelerometer(ii,:),accNoise); % Fuse gyroscope data. fuse(filt,gyro,sensorData.Gyroscope(ii,:),gyroNoise); % Extract the orientation state estimate using the stateparts object % function. estOrient(ii) = quaternion(stateparts(filt,"Orientation")); end
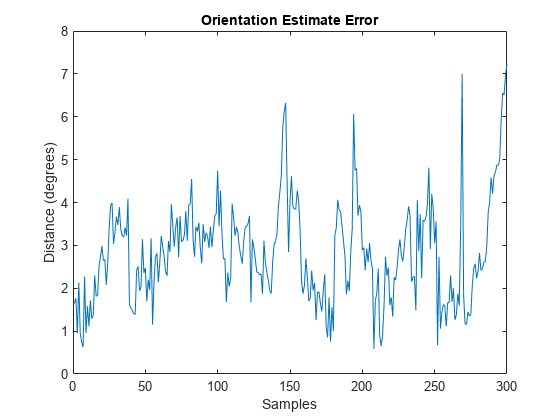
Visualize the estimate error, in quaternion distance, using the dist object function of the quaternion object.
figure plot(rad2deg(dist(estOrient,groundTruth.Orientation))) xlabel("Samples") ylabel("Distance (degrees)") title("Orientation Estimate Error")
Load measurement data from an accelerometer and a gyroscope.
load("accelGyroINSEKFData.mat");Create an insEKF filter object. Specify the orientation part of the state in the filter using the initial orientation from the measurement data. Specify the diagonal elements of the state estimate error covariance matrix corresponding to the orientation state as 0.01.
filt = insEKF; stateparts(filt,"Orientation",compact(initOrient)); statecovparts(filt,"Orientation",1e-2);
Specify the measurement noise and the additive process noise. You can obtain these values by using the tune object function of the filter object.
measureNoise = struct("AccelerometerNoise", 0.1739, ... "GyroscopeNoise", 1.1129); processNoise = diag([ ... 2.8586 1.3718 0.8956 3.2148 4.3574 2.5411 3.2148 0.5465 0.2811 ... 1.7149 0.1739 0.7752 0.1739]); filt.AdditiveProcessNoise = processNoise;
Batch-estimate the states using the estimateStates object function. Also, obtain the estimates after smoothing.
[estimates,smoothEstimates] = estimateStates(filt,sensorData,measureNoise);
Visualize the estimated orientation in Euler angles.
figure t = estimates.Properties.RowTimes; plot(t,eulerd(estimates.Orientation,"ZYX","frame")); title("Estimated Orientation"); ylabel("Degrees")

Visualize the estimated orientation after smoothing in Euler angles.
figure plot(t,eulerd(smoothEstimates.Orientation,"ZYX","frame")); title("Smoothed Orientation"); ylabel("Degrees")

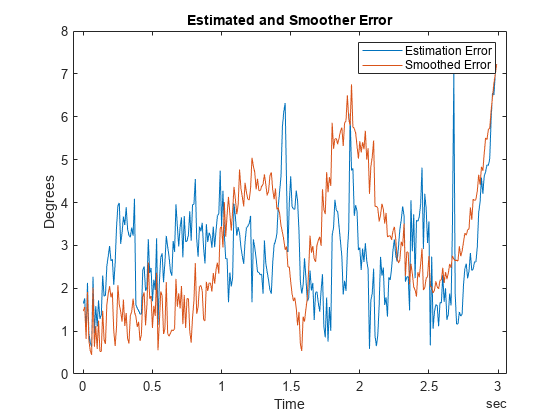
Visualize the estimate error, in quaternion distance, using the dist object function of the quaternion object.
trueOrient = groundTruth.Orientation; plot(t,rad2deg(dist(estimates.Orientation, trueOrient)), ... t,rad2deg(dist(smoothEstimates.Orientation, trueOrient))); title("Estimated and Smoother Error"); legend("Estimation Error","Smoothed Error") xlabel("Time"); ylabel("Degrees")
Extended Capabilities
Version History
Introduced in R2022a